7.10 Troubleshooting Without Fault Display
198 YASKAWA SIEPYEULA5001C LA500 Technical Manual
Causes Possible Solutions
You pushed .
Turn the Run command OFF then ON from an external input.
Note:
When you push during operation, the drive will ramp to stop. Set o2-02 = 0 [STOP
Key Function Selection = Disabled] to disable the function.
The 2-wire sequence and 3-wire sequence are not set correctly. • Set one of the parameters H1-03 to H1-07 [Terminals S3 to S7 Function Select] to 0 [3-Wire
Sequence] to enable the 3-wire sequence.
• If a 2-wire sequence is necessary, make sure that H1-03 to H1-07 ≠ 0.
◆ The Motor Rotates in the Opposite Direction from the Up/Down Command
Causes Possible Solutions
The phase wiring between the drive and motor is incorrect. • Examine the wiring between the drive and motor.
• Connect drive output terminals U/T1, V/T2, and W/T3 in the correct sequence to agree with
motor terminals U, V, and W.
• Switch two motor cables U, V, and W to reverse motor direction.
Drive control circuit terminals for the Up and Down commands are
switched.
• Connect drive output terminals U/T1, V/T2, and W/T3 in the correct sequence to agree with
motor terminals U, V, and W.
• Switch two motor cables U, V, and W to reverse motor direction.
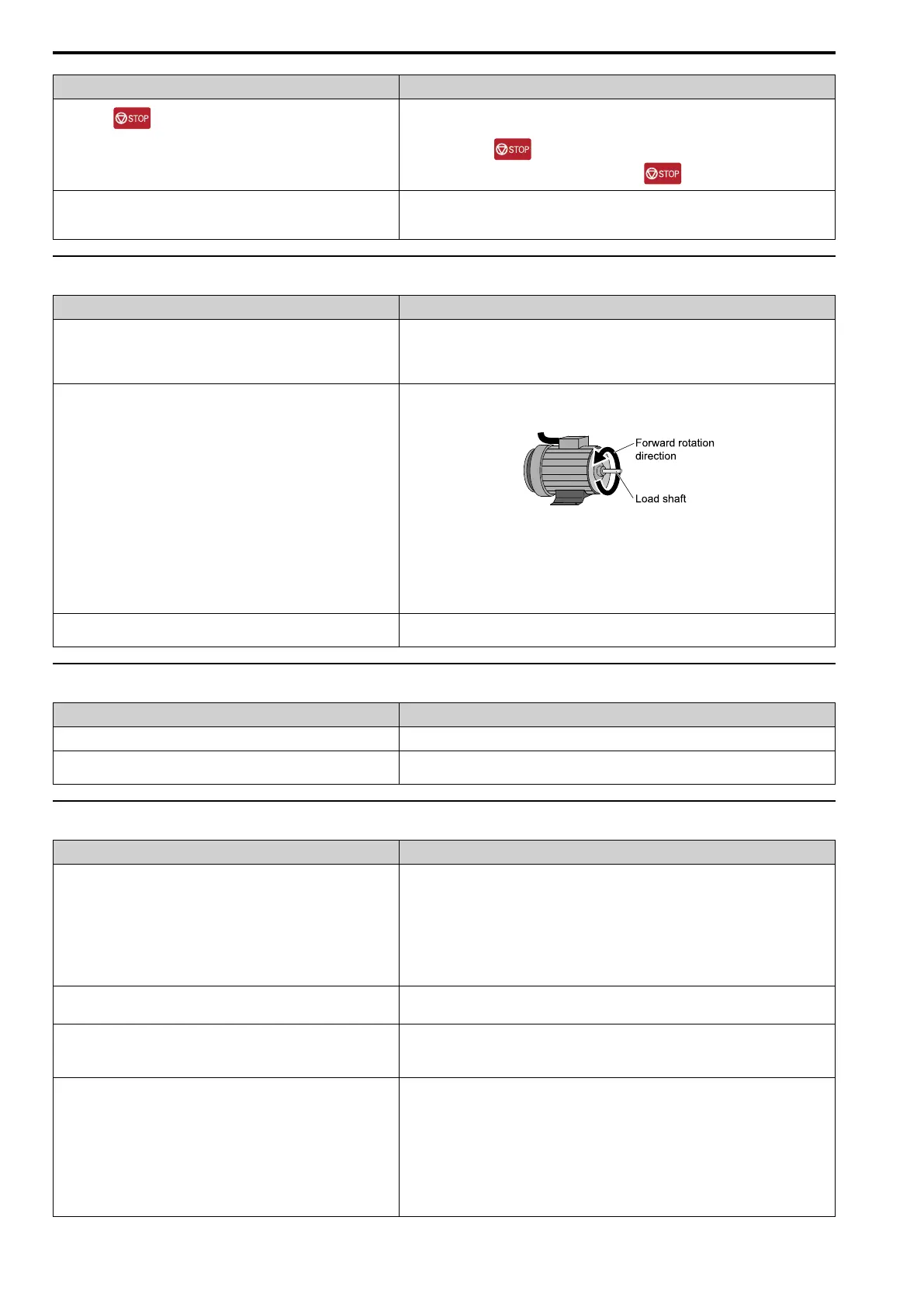
Figure 7.1 Forward Rotating Motor
Note:
• For Yaskawa motors, the forward direction is counterclockwise when looking from the
motor shaft side.
• Refer to the motor specifications, and make sure that the forward rotation direction is
correct for the application. The forward rotation direction of motors can be different for
different motor manufacturers and types.
The signal connections for forward run and reverse run on the drive control
circuit terminals and control panel side are incorrect.
Correctly wire the control circuit.
◆ The Motor Rotates in Only One Direction
Causes Possible Solutions
The drive will not let the motor rotate in reverse. Set b1-04 = 0 [Reverse Operation Selection = Reverse Enabled].
The drive did not receive a Reverse run signal and 3-Wire sequence is
selected.
Activate the terminals to which H1-xx = 0 [3-Wire Sequence] is set, and then enable reverse
operation.
◆ The Motor Is Too Hot
Causes Possible Solutions
The load is too heavy. • Decrease the load.
• Increase the acceleration and deceleration times.
• Examine the values set in L1-01 [Motor Overload (oL1) Protection], L1-02 [Motor Overload
Protection Time], and E2-01 [Motor Rated Current (FLA)].
• Use a larger motor.
Note:
The motor also has a short-term overload rating. Examine this rating carefully before setting
drive parameters.
The motor is running continuously at a very low speed. • Change the run speed.
• Use a drive-dedicated motor.
The drive is operating in a vector control mode, but Auto-Tuning has not
been done.
• Do Auto-Tuning.
• Calculate motor parameter and set motor parameters.
• Set A1-02 = 0 [Control Method Selection = V/f Control].
The voltage insulation between motor phases is not sufficient. • Use a motor with a voltage tolerance that is higher than the maximum voltage surge.
• Use a drive-dedicated motor that is rated for use with AC drives for applications that use a
motor on drives rated higher than 400 V class.
• Install an AC reactor on the output side of the drive and set C6-02 = 1 [Carrier Frequency
Selection = 2.0 kHz].
Note:
When the motor is connected to the drive output terminals U/T1, V/T2, and W/T3, surges
occur between the drive switching and the motor coils. These surges can be three times the
drive input power supply voltage (600 V for a 200 V class drive, 1200 V for a 400 V class
drive).

 Loading...
Loading...










