B.2 Setting Parameters
B-7
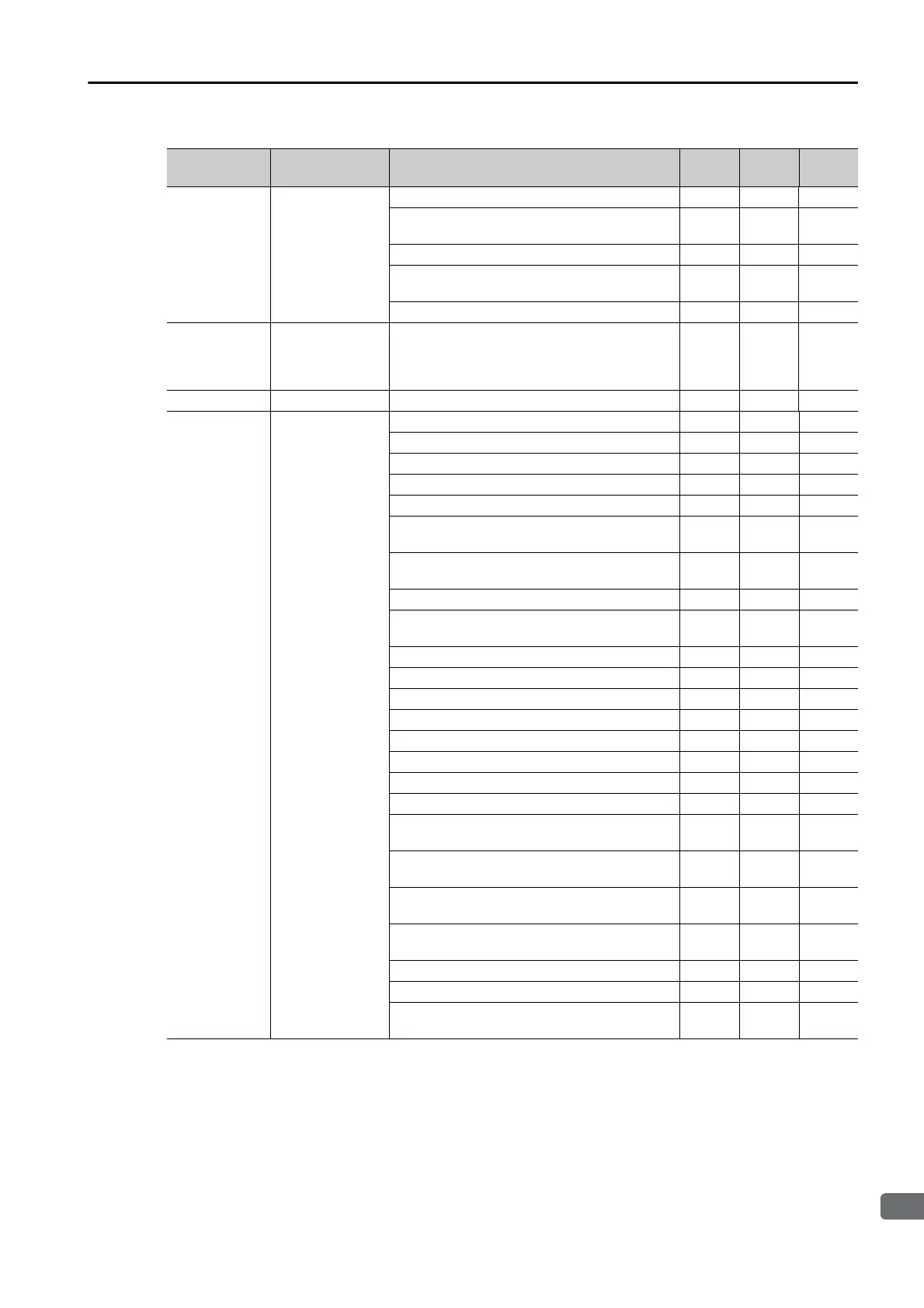
OW05
Function Set-
tings 3
Bit 0: Reserved for system. −−−
Bit 1: Disable Phase Reference Calculation
0: Enabled, 1: Disabled
√√−
Bits 2 to A: Reserved for system. −−−
Bit B: Zero Point Return Input Signal
0: OFF, 1: ON
√√−
Bits C to F: Reserved for system. −−−
OW06
M-III Vendor-
specific Servo
Command Out-
put Signal
This parameter is used as a vendor-specific
output area.
√√−
OW07 − Reserved for system. −−−
OW08
(Continued on
next page.)
Motion Com-
mands
0: NOP (No Operation) (No command) √√√
1: POSING (Positioning) √√√
2: EX_POSING (External Positioning) √√√
3: ZRET (Zero Point Return) √√√
4: INTERPOLATE (Interpolation) √√√
5: ENDOF_INTERPOLATE (Last Interpolation
Segment) (Reserved for system use.)
√√√
6: LATCH (Latch)
(Interpolation mode with latch input)
√√√
7: FEED (Jog) (Jog mode) √√√
8: STEP (STEP Operation) (Relative position
mode)
√√√
9: ZSET (Set Zero Point) √√√
10: ACC (Change Acceleration Time) √√√
11: DCC (Change Deceleration Time) √√√
12: SCC (Change Filter Time Constant) √√√
13: CHG_FILTER (Change Filter Type) √√√
14: KVS (Change Speed Loop Gain) √√−
15: KPS (Change Position Loop Gain) √√−
16: KFS (Change Feedforward) √√−
17: PRM_RD (Read Parameter)
(Read user constant)
√√−
18: PRM_WR (Write Parameter)
(Write user constant)
√√−
19: ALM_MON (Monitor Alarms)
(Alarm monitor)
√√−
20: ALM_HIST (Monitor Alarm History)
(Alarm history monitor)
√√−
21: ALMHIST_CLR (Clear Alarm History) √√−
22: Reserved for system. −−−
23: VELO (Issue Speed Reference) (Speed
reference)
√√√
Continued on next page.
Continued from previous page.
Register
Address
Name Description SVB
SVC or
SVC32
SVR or
SVR32

 Loading...
Loading...






