Page 106 February 2020 – TD 266 OPERATING MANUAL – ZPulse® DCS 4420/4830/4520/4930
8.2.2 Orientation/Steering pin as reference
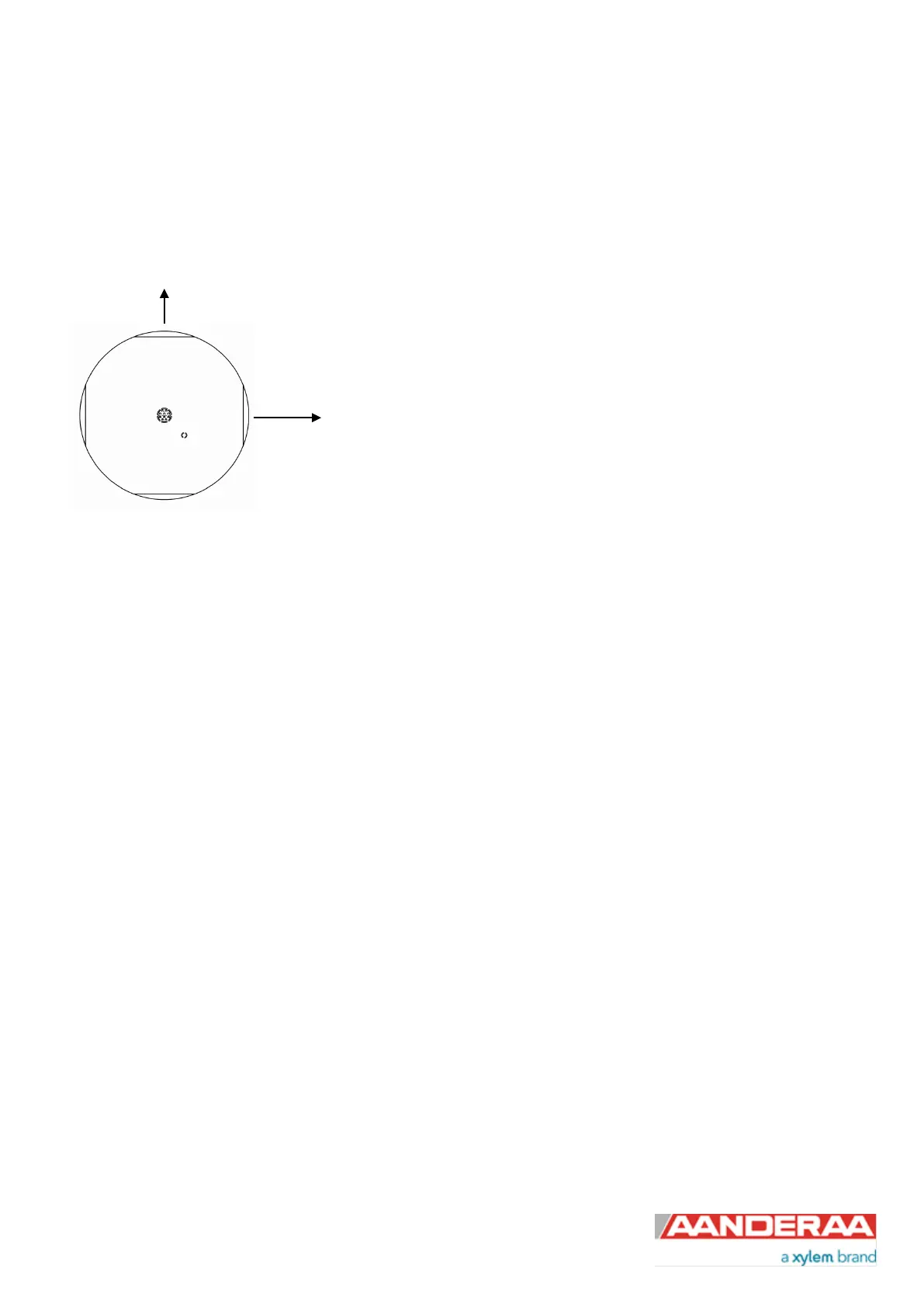
Another method is to use the orientation pin underneath the sensor. This pin is placed between transducer 2 and 3. The
heading is 225 degrees (360-135) if the orientation pin is towards magnetic north, i.e. transducer 1 is 225 degree
clockwise from the orientation pin. The positioning of the orientation pin is shown in Figure 8-3.
• Use the same methods as described in chapter 8.2.1
• Remember that the angle between transducer 1 and the
steering/orientation pin is 225 degrees.
• Add 225 degrees to the measured orientation of this pin when used as
fixed heading setting. If larger than 360, subtract 360 from the value.
• If external compass input, add 225 degrees to the angle measured
between the external compass and the orientation pin. Set the
heading alignment offset value equal to this value. If larger than 360,
subtract 360 from the value.
Figure 8-3 Orientation pin placement on end plate
8.2.3 Transducer 1 as reference when upside-down
Use the same method as when the sensor is upward looking. Rotating clockwise gives an increasing angle. The sensor
is able to sense its vertical orientation sensor and automatically correct for the upside-down orientation of the sensor.
NOTE: To check the value measured by the tilt and heading sensor refer to chapter 4.2. Viewing incoming data
in real-time.
8.2.4 Orientation/Steering pin as reference when upside-down
Now transducer 1 is 135 degrees clockwise from the orientation pin. Add 135 degrees instead of 225 degrees.