February 2020 – TD 266 OPERATING MANUAL – ZPulse® DCS 4420/4830/4520/4930 Page 63
This menu is only available in AiCaP mode and when SGII and SmG Feature are enabled under User Maintenance.
Do not use this feature with SeaGuard.
By using the Input Parameter Compass function the sensor can take an input from an external Compass, like for
example the Airmar H2183 Compass. Surface buoys are often made of steel. The magnetic influence from the buoy can
give a big error on the compass heading measured by the DCS. A compass mounted on a mast away from the buoy
structure is often a better method which gives a more accurate compass measurement. Select a compass connected to
the Logger in the Sensor Id drop-down menu if available and the heading parameter in Parameter Id (Deg, M). The
Heading Alignment Offset (Deg.M) value can be set to compensate for the misalignment between the compass axes
and the axes on the DCS.
NOTE!
Do not use the DCS as an external reference even if it is available in the list
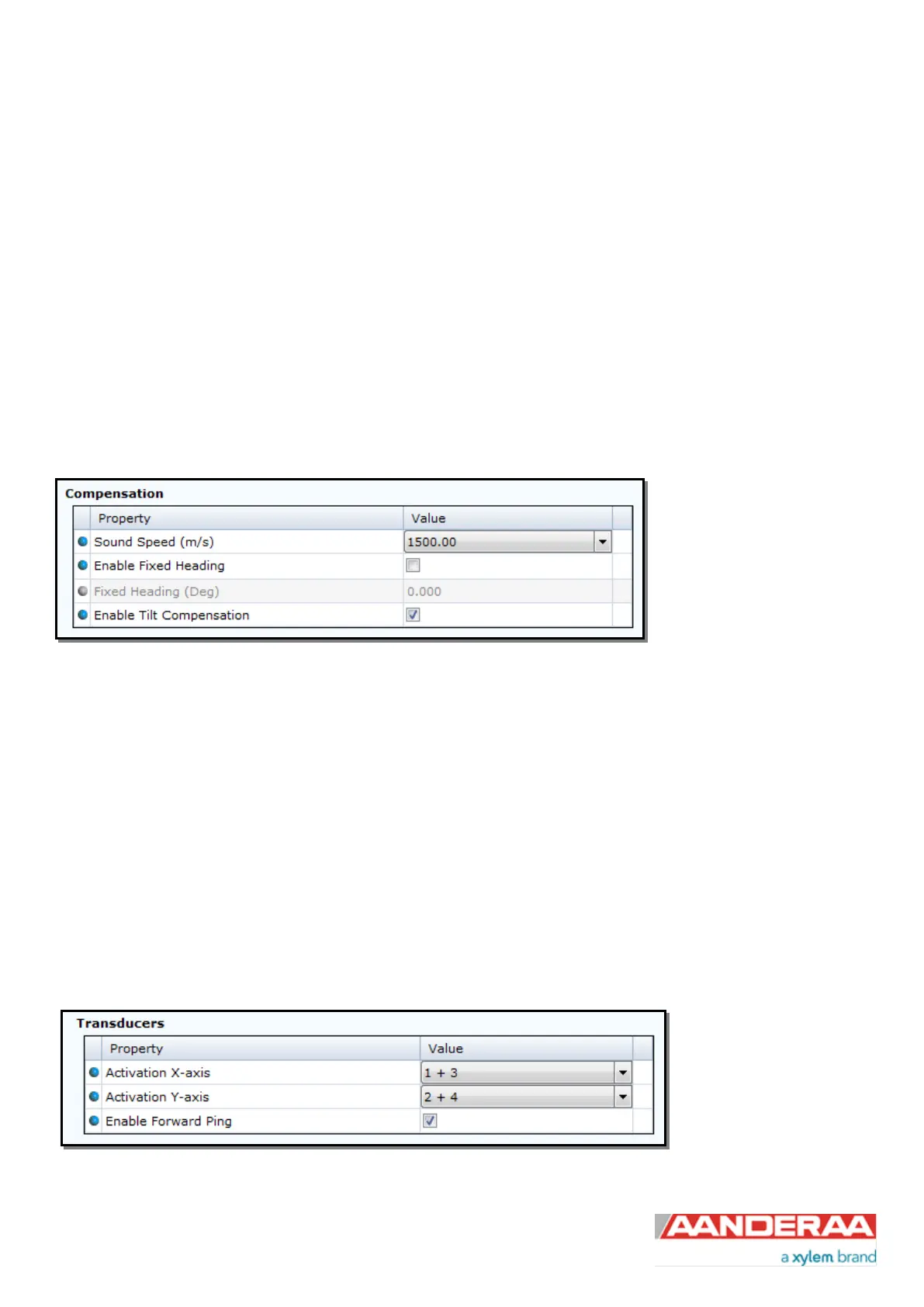
3.12.5 Compensation
Figure 3-32: Compensation
Sound Speed (m/s) is the fixed sound speed setting in m/s. This value is used for calculation of current speed values.
Default value for sea water is 1500.
Enable Fixed Heading might be used if there is any magnetic disturbance that might interfere with a compass heading
and the instrument has a fix position. Then Fixed Heading (Deg.M) can be used to set the offset between the Sensor
North direction and the Magnetic North.
Enable Tilt Compensation is recommended to set active at all time because then the sensor will automatically
compensate for any tilt.
3.12.6 Transducers
Figure 3-33: Transducers