Parameters and firmware blocks
162
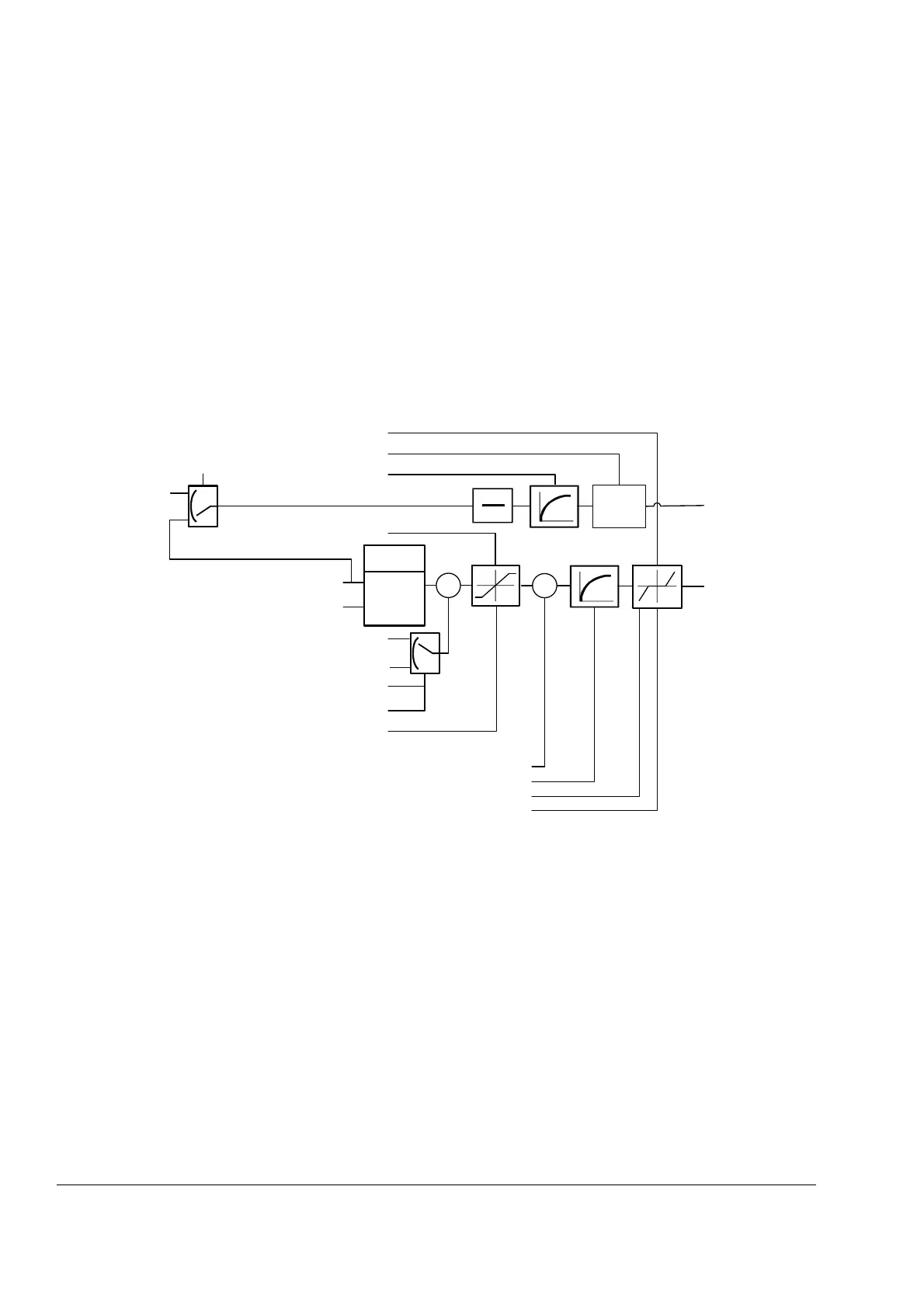
Group 26 SPEED ERROR
Speed error is determined by comparing the speed reference and speed feedback.
The error can be filtered using a first-order low-pass filter if the feedback and
reference have disturbances. In addition, a torque boost can be applied to
compensate acceleration; the torque is relative to the rate of change (derivative) in
the speed reference and inertia of the load. The speed error value can be supervised
using the window function.
The signals used as speed reference are (see also parameter group 34 on page
183):
• 3.04 SPEEDREF RAMPED (speed, “min” and “max” control modes)
• 4.01 SPEED REF POS (position, synchron and homing control modes)
• 4.20 SPEED FEED FWD (profile velocity mode).
26.05 SPEED STEP
26.06 SPD ERR FTIME
20.01 MAXIMUM SPEED
20.02 MINIMUM SPEED
T
AccCom
26.08 ACC COMP DER TIME
26.09 ACC COMP FTIME
d
dt
0
06.02 STATUS WORD 2 bit 14
RAMP OUT 0
06.02 STATUS WORD 2 bit 12
RAMP IN 0
+
-
26.10 SPEED WIN FUNC
26.11 SPEED WIN HI
26.12 SPEED WIN LO
4.01 SPEED REF PCTRL
26.04 SPEED FEED PCTRL
1.01 SPEED ACT NCTRL
OPMODE =
POSITION SYNCRON
03.04 SPEED REF NCTRL
SPEED
POSITION
SYNCHRON
HOMING
PROF VEL
6.12 OP
MODE ACK
+
3.06 SPEED ERROR FILT
3.07 ACC COMP TORQ