Parameters and firmware blocks
168
28
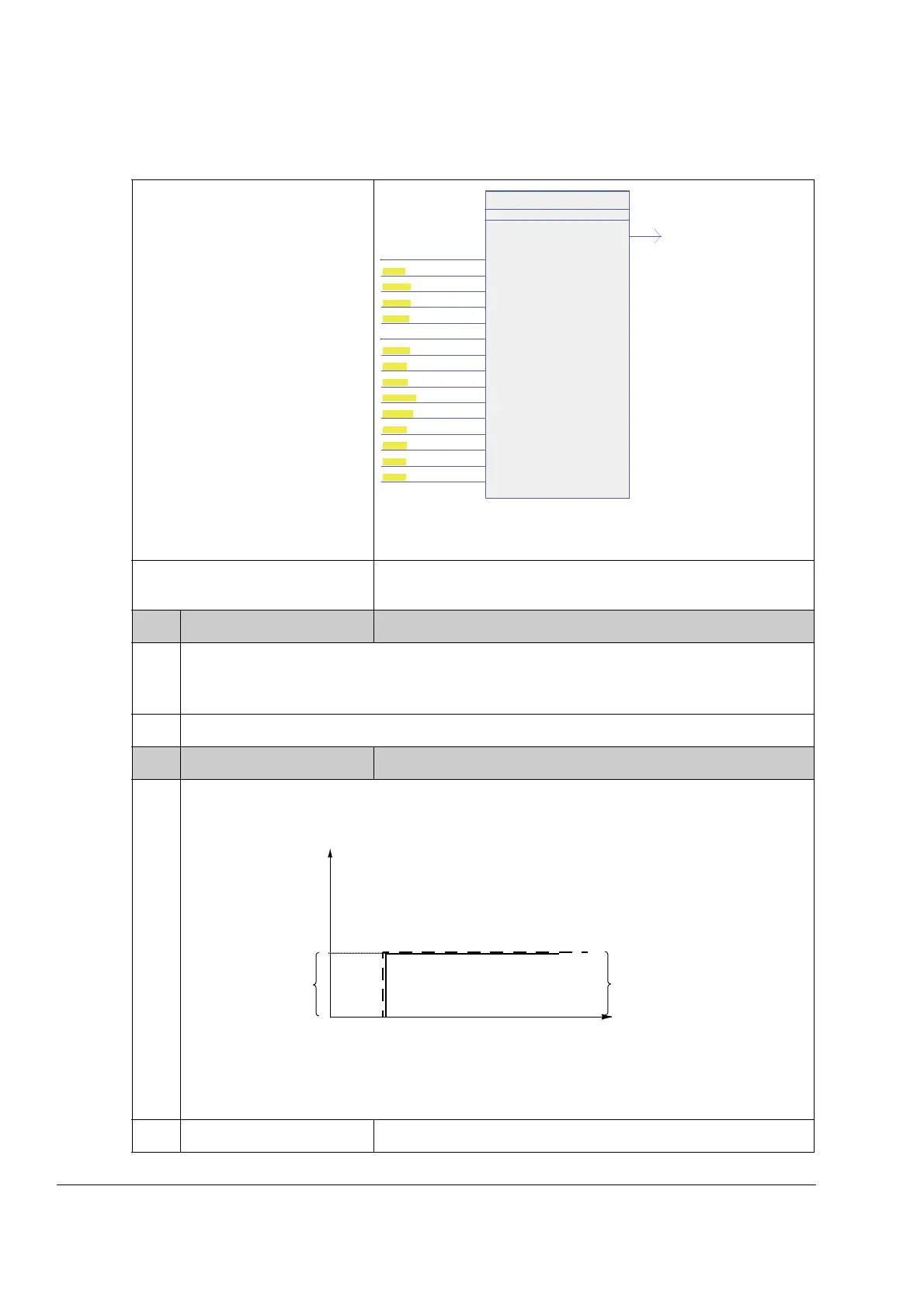
Firmware block:
SPEED CONTROL
(28)
This block
• selects the source for speed error
• adjusts PID-type speed controller
variables
• defines limits for speed controller
output torque
• selects the source for acceleration
compensation torque
• configures the balancing function
which forces the output of the
speed controller to an external
value
• configures the drooping function
(adjustment of load sharing in a
Master/Follower application)
• shows the limited speed controller
output torque value.
Block outputs located in other
parameter groups
3.08 TORQ REF SP CTRL (page 101)
28.01 SPEED ERR NCTRL FW block: SPEED CONTROL (see above)
Selects the source for the speed error (reference - actual). The default value is P.3.6, ie, parameter
3.06 SPEED ERROR FILT, which is the output of the SPEED ERROR firmware block.
Note: This parameter has been locked, ie, no user setting is possible.
Value pointer: Group and index
28.02 PROPORT GAIN FW block: SPEED CONTROL (see above)
Defines the proportional gain (K
p
) of the speed controller. Too large a gain may cause speed
oscillation. The figure below shows the speed controller output after an error step when the error
remains constant.
If gain is set to 1, a 10% change in error value (reference - actual value) causes the speed controller
output to change by 10%.
Note: This parameter is automatically set by the speed controller autotune function. See parameter
28.16 PI TUNE MODE.
0…200 Proportional gain for speed controller.
SPEED CONTROL
7
TLF 3 2 50 µsec (3)
< 28.01 SPEED ERR NCTRL
SPEED ERROR FILT
(7 / 3.06)
28.02 PROPORT GAIN
[ 10.00 ]
28.03 INTEGRATION TIME
[ 0.500 s ]
28.04 DERIVATION TIME
[ 0.000 s ]
28.05 DERIV FILT TIME
[ 8.0 ms ]
< 28.06 ACC COMPENSATION
ACC COMP TORQ
(7 / 3.07)
28.07 DROOPING RATE
[ 0.00 % ]
28.08 BAL REFERENCE
[ 0.0 % ]
< 28 .09 SPEEDCTRL BAL EN
[ FALSE ]
28.10 MIN TORQ SP CTRL
[ -300.0 % ]
28.11 MAX TORQ SP CTRL
[ 300.0 % ]
28.12 PI ADAPT MAX SPD
[ 0 rpm ]
28.13 PI ADAPT MIN SPD
[ 0 rpm ]
28.14 P GAIN ADPT COEF
[ 1.000 ]
28.15 I TIME ADPT COEF
[ 1.000 ]
3.08 TORQ REF SP CTRL
Gain = K
p
= 1
T
I
= Integration time = 0
T
D
= Derivation time = 0
t
%
Controller output
= K
p
×e
Error value
Controller output
e = Error value