Drive control and features
66
Position reference sets
The user can define two different position reference sets. Each reference set
consists of
• position reference
• positioning speed reference
• positioning acceleration reference
• positioning deceleration reference
• positioning reference filter time
• positioning style
• positioning speed when target is reached.
One reference set is used at a time. The definition and selection of position
reference sets are done using the parameters in group 65.
Dynamic position reference limiter
The dynamic limiter controls the position reference limitation in position control and
synchron control modes. Dynamic limitation of the position reference causes
a synchron error (4.18 SYNC ERROR). The error is accumulated and fed back to the
position profile generator. The synchron error is corrected according to the values of
the active positioning table parameters in group 65.
Note: Make sure that parameter 65.05 < 70.04, parameter 65.06 < 70.05 and
parameter 65.07 < 70.06. Otherwise, the drive may oscillate.
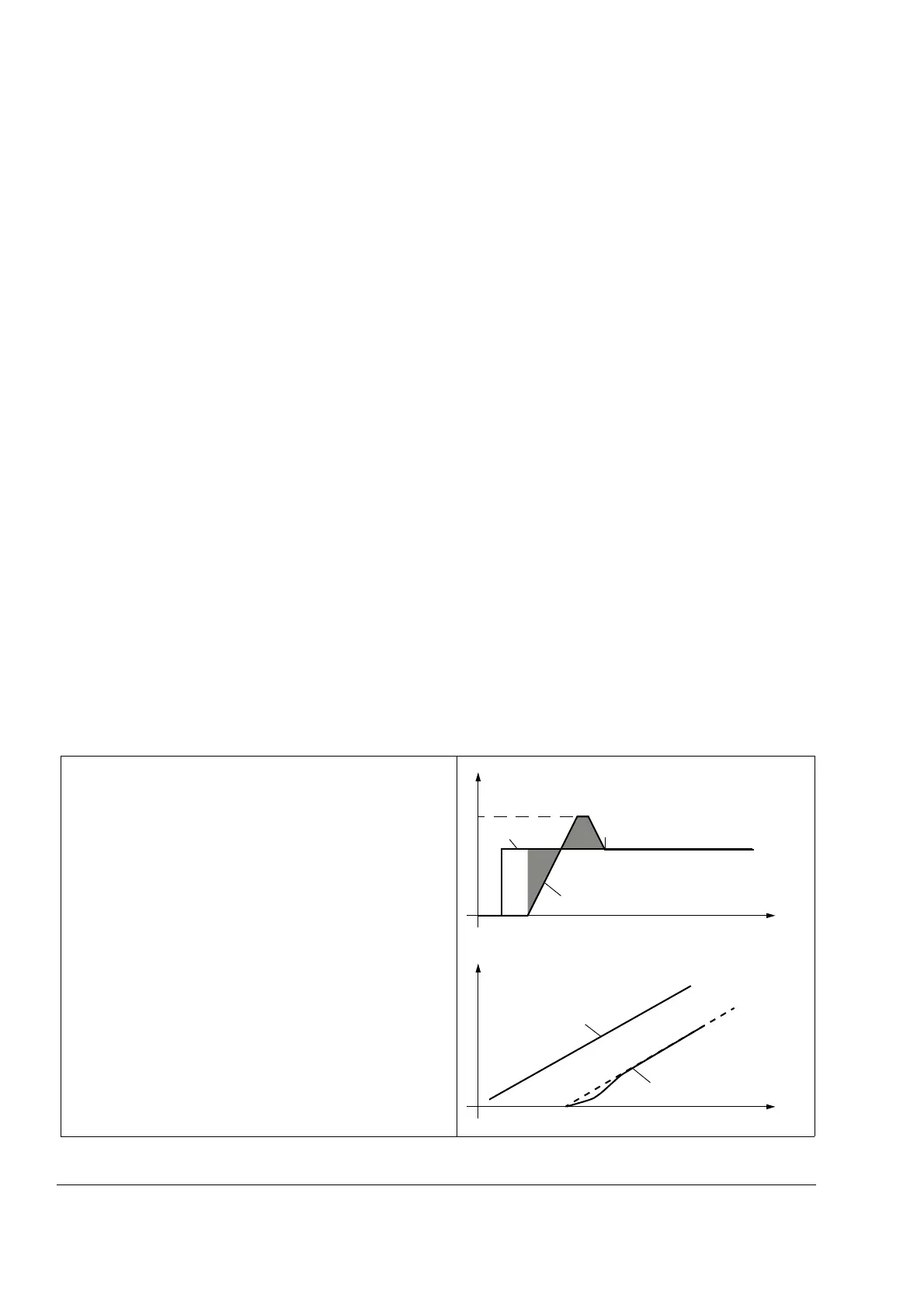
Start/stop examples with dynamic limiter
The speed curves of the master and follower during the start and stop are presented
in the figures below.
When the follower is in synchron control, the reference can be taken from the
encoder or from another drive. The master can be in any control mode.
Start: linear axis, relative synchronisation
Used when the master is to be distance C ahead of the
follower at start.
60.02 POS AXIS MODE is set to (0) Linear. 68.07
SYNCHRON MODE is set to (1) Relative.
To catch the master position, the follower accelerates
up to its maximum allowed speed. Only master position
changes which take place after the follower is started
are taken into account.
Start: rollover axis
60.02 POS AXIS MODE is set to (1) Rollover.
The follower accelerates until it has reached the master
shaft position angle (position per one revolution,
0…360
°). Rotations of the master are not counted.
t
A
B
C
70.05 POS ACCEL LIM
70.06 POS DECEL LIM
70.04 POS SPEED LIM
Master speed
Follower speed
Synchronised
Speed
A = B
t
Synchron
position
reference
Position
Follower position
Master position
Follower start