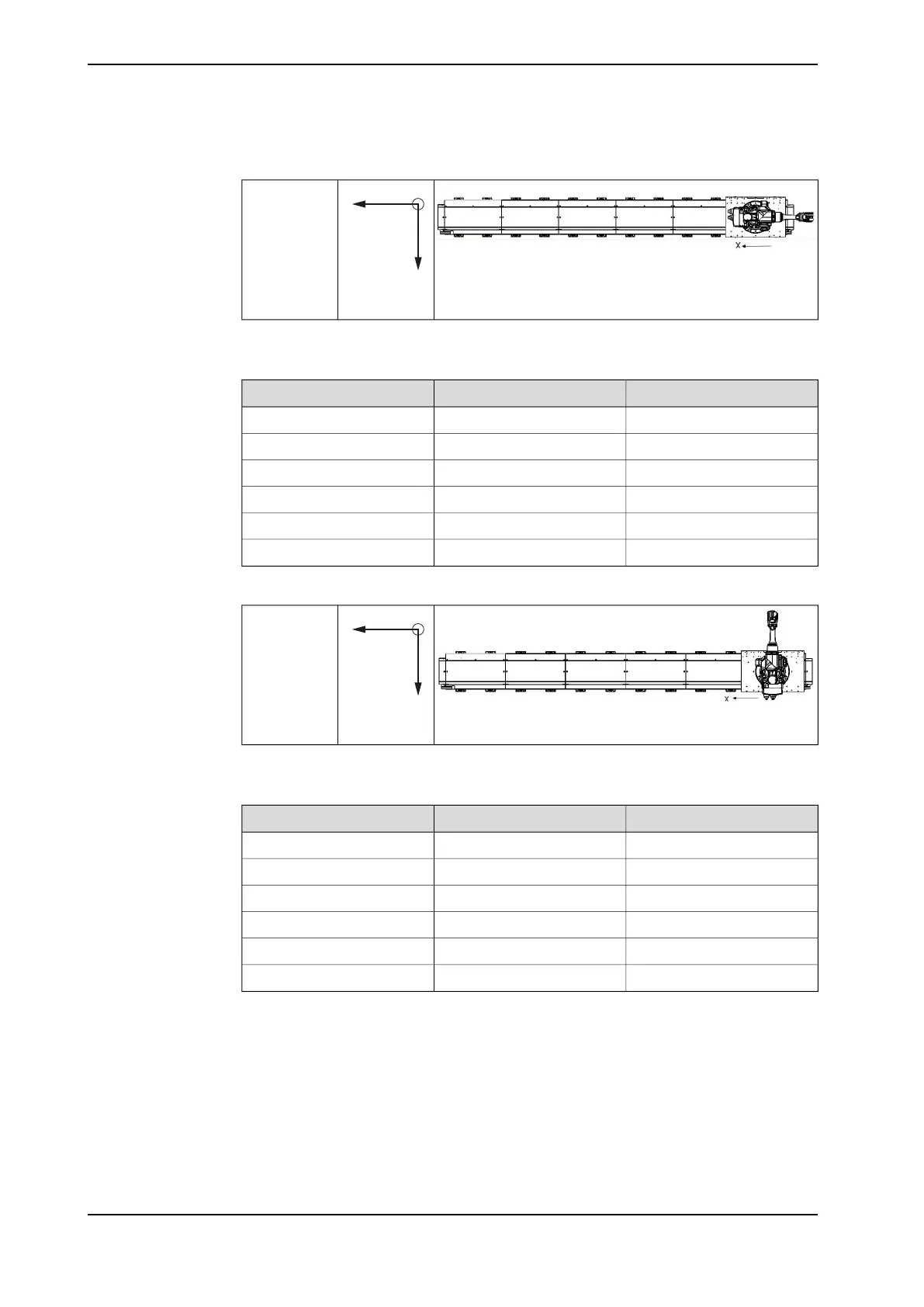
IRB rotated 180° in relation to the World coordinate system
xx1500000633
xx1500000927
+180 degrees
• Positive travel direction x in World coordinates
• Mirrored travel direction
Track motion (TRACK_1)Robot (ROB_1)Parameter
10Base Frame q1
00Base Frame q2
00Base Frame q3
01Base Frame q4
-3.141593Gamma Rotation
track1-lin-Use Joint
IRB rotated 270° in relation to the World coordinate system
xx1500000634
xx1500000927
+270 degrees
• Positive travel direction x in World coordinates
• Mirrored travel direction
Track motion (TRACK_1)Robot (ROB_1)Parameter
10.707107Base Frame q1
00Base Frame q2
00Base Frame q3
0-0.707107Base Frame q4
--1.570796Gamma Rotation
track1-lin-Use Joint
138 Product manual - IRBT 2005
3HAC051130-001 Revision: F
© Copyright 2015 - 2018 ABB. All rights reserved.
2 Installation and commissioning
2.7.4.2 Configuration examples
Continued

 Loading...
Loading...





