2.7.2 Creating and downloading a system
Introduction
The PC application RobotStudio is used for creating and downloading systems to
the controller.
The procedure how to create and download a system is different depending on if
the controller is installed with RobotWare 5 or RobotWare 6. RobotStudio version
6 or later supports both procedures.
Note
The track motion IRBT 2005 is only supported by RobotWare 6 and later.
In RobotStudio, use Installation Manager to create and modify systems with
RobotWare 6 and later.
For more information, see Operating manual - RobotStudio.
Before modifying the system
Before modifying the system it is recommended to take a backup of the system
and put all axes of the robot and any external axes are in their zero positions.
Creating a system
In RobotWare 6, the track motion is loaded as an Add-In. The track motion Add-In
does not require a license.
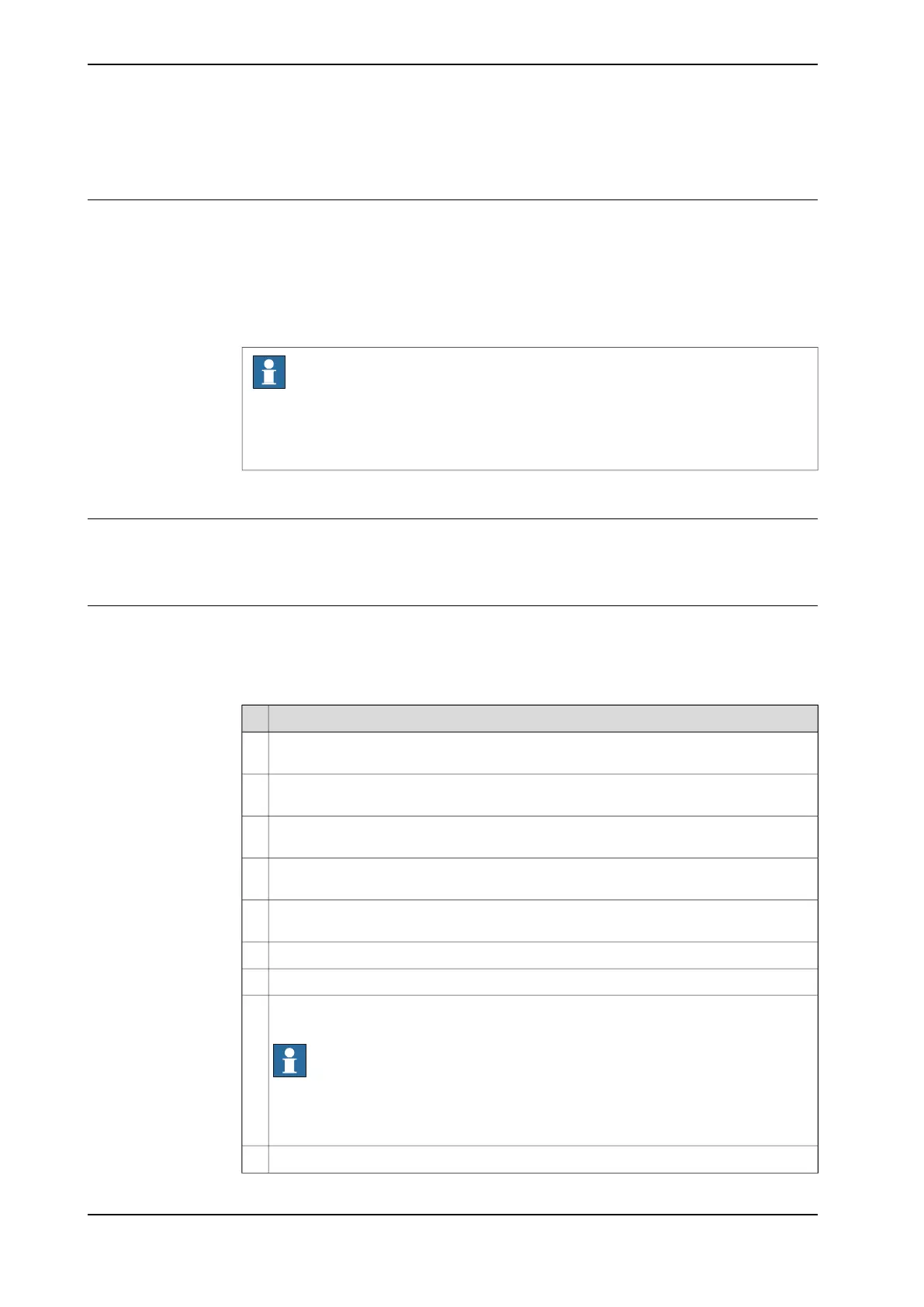
Use this procedure to create and modify the system.
Action
Create a new system based on the existing system using the Installation Manager in
RobotStudio.
1
In the Products tab, click Add and select the RobotWare and TrackMotion product
manifests.
2
In the Licenses tab, add the license for RobotWare. The track motion does not require
a license.
3
In the Options tab, Drive Modules pane, add the additional drive unit (ADU) that controls
your track motion.
4
In the Options tab, Drive Modules pane, select and modify the options that suits your
track motion. For example track motion type, robot orientation etc.
5
Complete the Installation Manager wizard.6
Apply the changes to the system and restart the controller.7
Load the necessary system parameters, system modules, and program modules from
the backup and restart the controller.
Note
Do not restore the old motion configuration file moc.cfg, this will remove the track
motion settings. Instead, use Load parameters and replace duplicates from the
Configuration window on the FlexPendant Control Panel.
8
Update the revolution counters, see Update revolution counters on page 265.9
Continues on next page
124 Product manual - IRBT 2005
3HAC051130-001 Revision: F
© Copyright 2015 - 2018 ABB. All rights reserved.
2 Installation and commissioning
2.7.2 Creating and downloading a system