2.5 Assembling the manipulator and cable tray
2.5.1 Assembling the manipulator
Overview
When IRBT 2005 is associated with an IRB robot, it behaves like an integrated 7th
axis. However, the robot controller must fulfill some requirements to get an optimum
integration. IRBT 2005 has been designed for ABB IRC5 controller. For how to link
the robot to the track and how to orient the manipulator, see Software installation
on page 123.
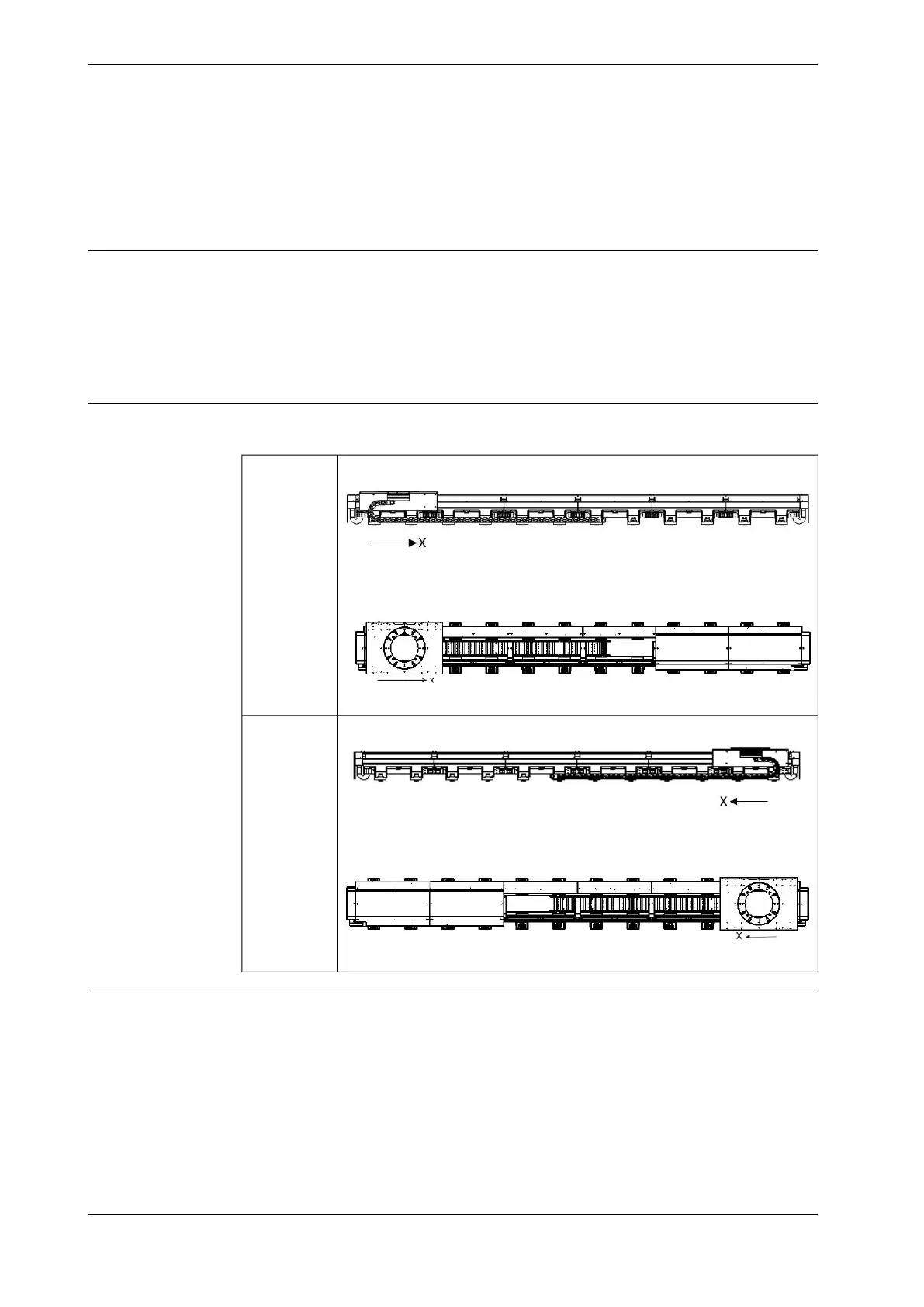
Cable chain orientation
There are two orientations to fit the cable chain.
Side view:
xx1500000597
Standard
cable chain
orientation
Top view:
xx1400001952
Side view:
xx1500000630
Mirrored cable
chain orienta-
tion
Top view:
xx1400001951
Robot capacity
The following table shows the robot capability of IRBT 2005.
Standard pedestals are generally allowed between the IRBT 2005 carriage and the
robot but their height is limited and dependent on the type of the IRBT 2005 and
the type of robot.
Continues on next page
108 Product manual - IRBT 2005
3HAC051130-001 Revision: F
© Copyright 2015 - 2018 ABB. All rights reserved.
2 Installation and commissioning
2.5.1 Assembling the manipulator