Configuration Mode (ConF)
Motor control
The param eters in the
[MOTOR CONTROL]
(drC-)
m enu can only be m odified when the drive is s topped
and no run com mand is present, with the following exceptions:
•
[Auto tuning]
(tUn)
page 113, which m ay caus e the m otor to s tart up.
•
Param eters containing the s ign
in the code colum n, which can be m odified with the drive running or
stopped.
Note : We recom m end to perform auto-tuning if one of the following param eters are m odified from their
factory s etting.
Code Nam e / De s cription Adjustment range Factory s e tting
bFr
50
60
[Standard mot. freq]
[50 Hz IEC]
(50)
This parameter modifies the presets of the follow ing parameters:
[High s peed]
(HSP) page 87,
[Freq. threshold]
(Ftd)
page
102,
[Rated
mot or
volt.]
(
UnS
),
[Rate d
motor
freq.]
(
FrS
)
and
[Max
freque nc y ]
(
tF
r
).
[50 Hz IEC]
(50): IEC
[60 Hz NEM A] (60):
NEMA
tFr
[Max frequency]
10 to 599 Hz 60 Hz
The factory setting is 60 Hz, or preset to 72 Hz if
[Standard m ot. freq]
(bFr)
is set to 60 Hz.
The maximum value is limited by the follow ing conditions:
It must not exceed 10 times the value of
[Rated m otor freq.]
(FrS).
Ctt
UUC
Std
[Motor control type]
[Standard]
(Std)
Note:
Select law before entering parameter values.
[SVC V]
(UUC): Sensorless vector control with internal speed loop based on voltage feedback calculation. For applications
needing high performance during starting or operation.
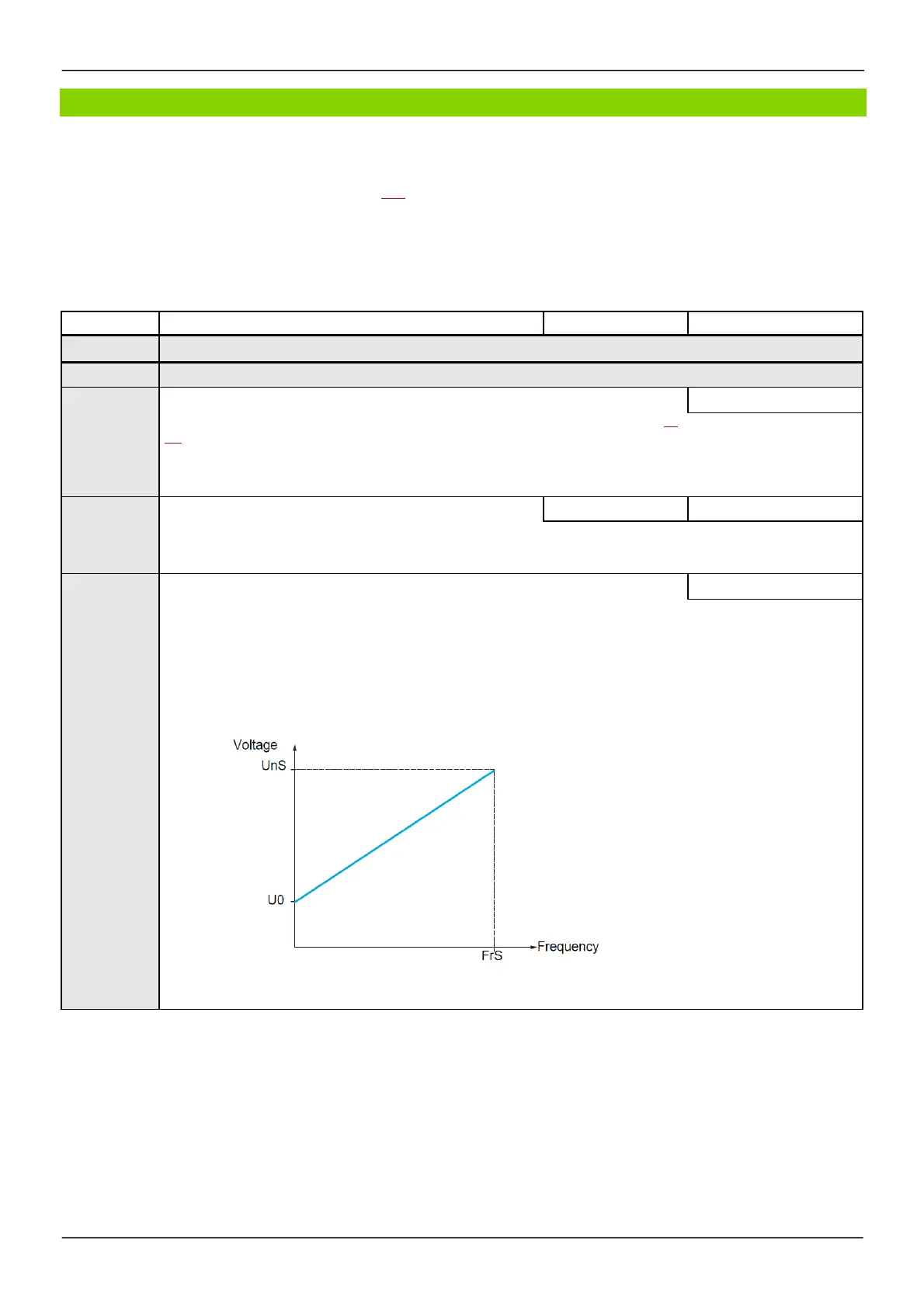
[Standard]
(Std):
Standard motor law . For simple applications that do not require high performance. Simple motor control law
keeping a constant Voltage Frequency ratio, w ith a possible adjustment of the curve bottom This law is generally used for motors
connected in parallel. Some specific applications with motors in parallel and high performance levels may require
[SVC V]
(UUC).
Voltage
UnS
U0
Frequency
FrS
Note:
U0 is the result of an internal calculation based on motor parameters and multiplied by UFr (%). U0 can be adjusted by
modifying UFr value.
Parameters described in this page can be accessed by:
DRI- > CONF > FULL > DRC-
 Loading...
Loading...
