Configuration Mode (ConF)
Special case: Parameter [K speed loop filter]
(SFC)
is not 0
This param eter m us t be res erved for specific applications that require a short res ponse tim e (trajectory
positioning or servo control).
•
When set to 100 as des cribed above, the regulator is a “PI” type, without filtering of the s peed reference.
•
Settings between 0 and 100 will obtain an interm ediate function between the s ettings below and thos e on
the previous page.
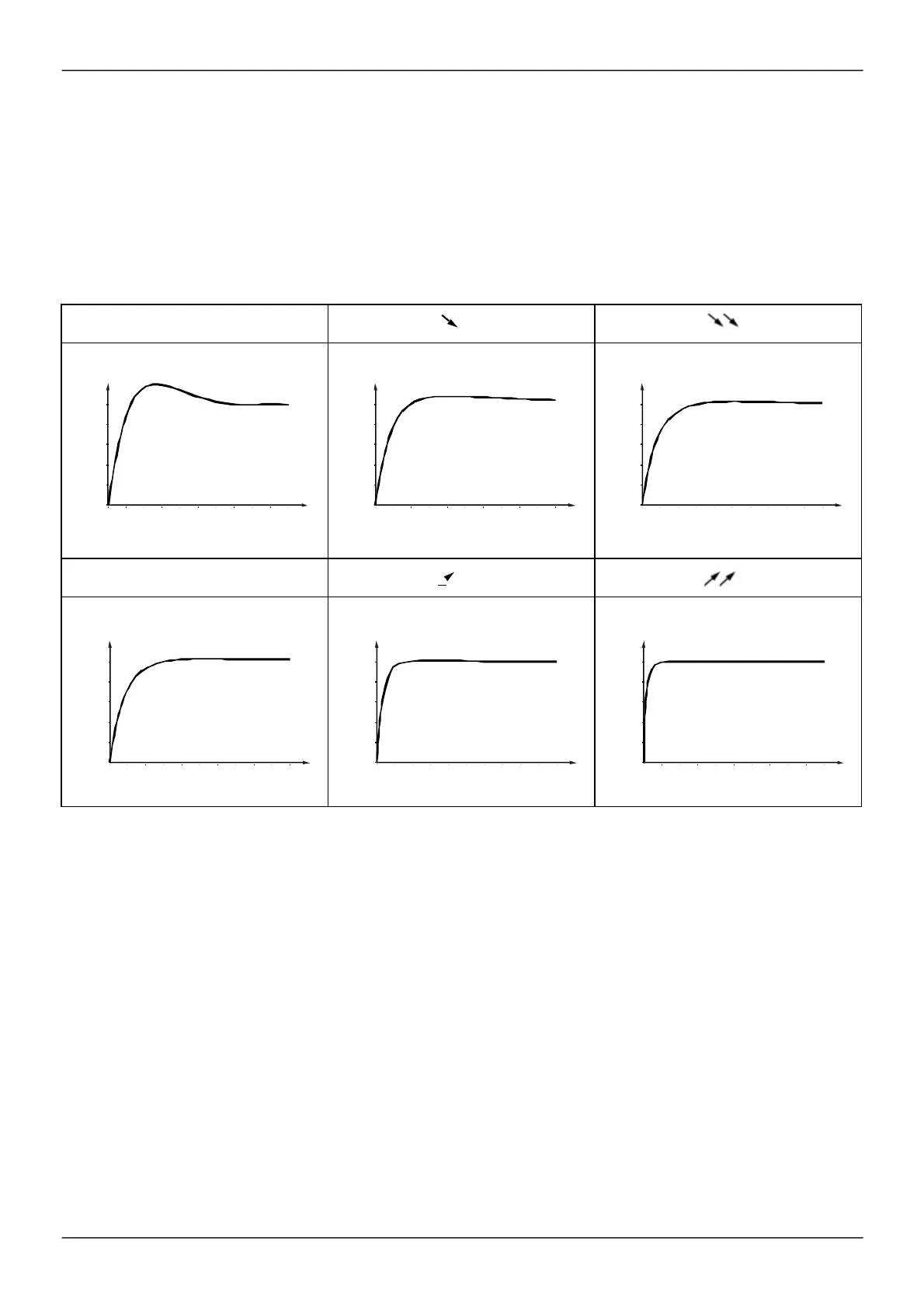
Exam ple: Setting for
[K speed loop filter]
(SFC) = 100
•
[Speed prop. gain]
(SPG) affects the pass band and response tim e.
•
[Speed time integral]
(
SI
t
) affects exces sive speed.
Initial re s ponse
Re duction in SIT
Re duction in SIT
Reference division
Reference division
Reference division
1
1
1
0.8 0.8 0.8
0.6 0.6 0.6
0.4 0.4 0.4
0.2 0.2 0.2
0 0 0
0 50 100 150 200 250 300 350 400 450 500
0 50 100 150 200 250 300 350 400 450 500
Initial re s ponse
Increase in SPG
Increase in SPG
Reference division
Reference division
Reference division
1
1
1
0.8 0.8 0.8
0.6 0.6 0.6
0.4 0.4 0.4
0.2 0.2 0.2
0 0 0
200 250 300 350 400 450 500
0 50 100 150 200 250 300 350 400 450 500
0 50 100 150 200 250 300 350 400 450 500
 Loading...
Loading...
