7. Service Procedures (Undefined variable: MyVariables.ProductName)
Replacing Servo Gripper with Pneu-
matic or Vacuum Gripper
Part Number: PF40-DI-00010 Rev. A
Step Action
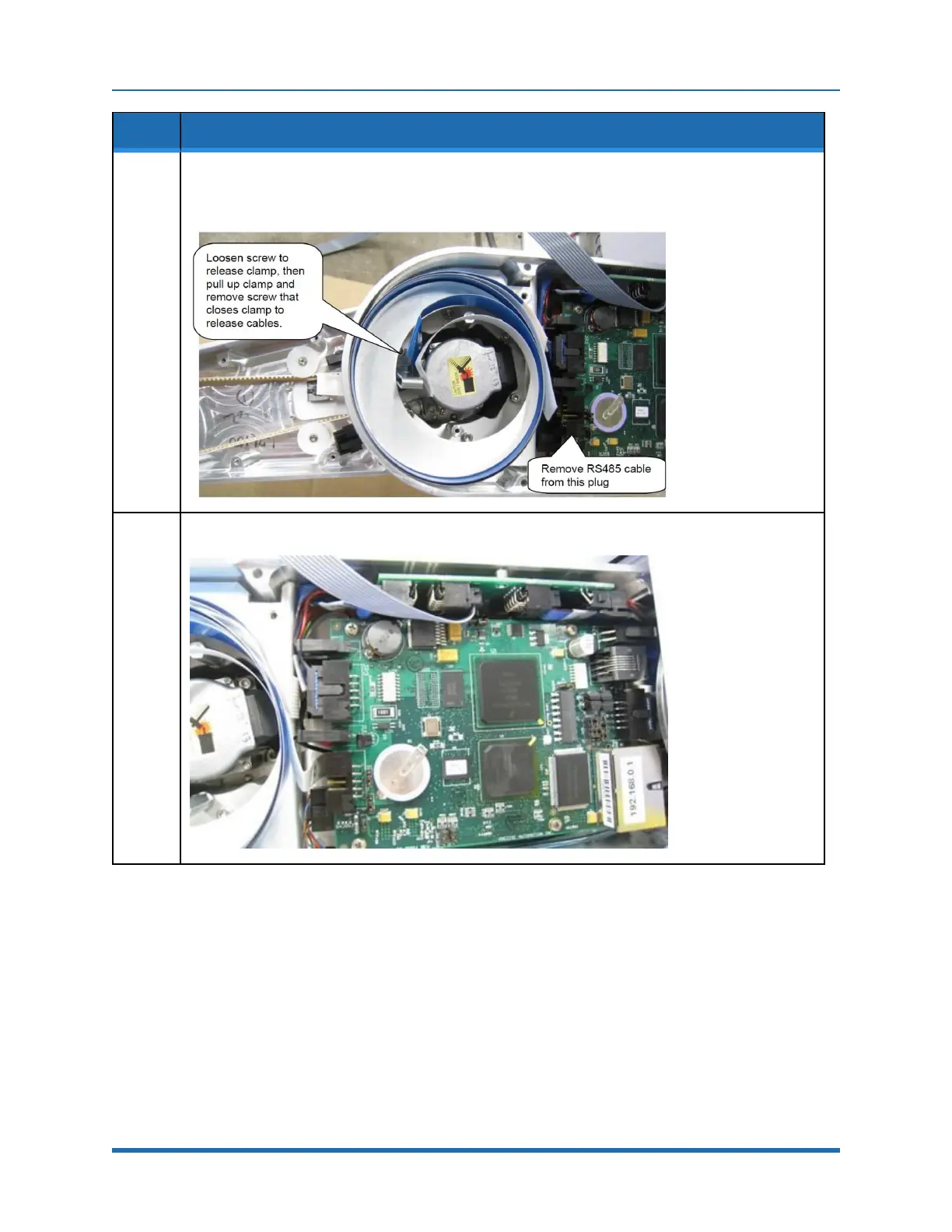
13.
Remove the RS-485 10 conductor ribbon cable from the robot by feeding the connector up past the J4
motor in the outer link, removing this cable from the retaining clamps, and unplugging it from the RS-
485 connector in the controller.
14.
Plug IO cable for pneumatic gripper option into IO connector on side of inner link.
149
Copyright © 2023, Brooks Automation