ComNav P4 Installation and Operation
Basic Operations
Document PN 29010100 V1r0 - 146 -
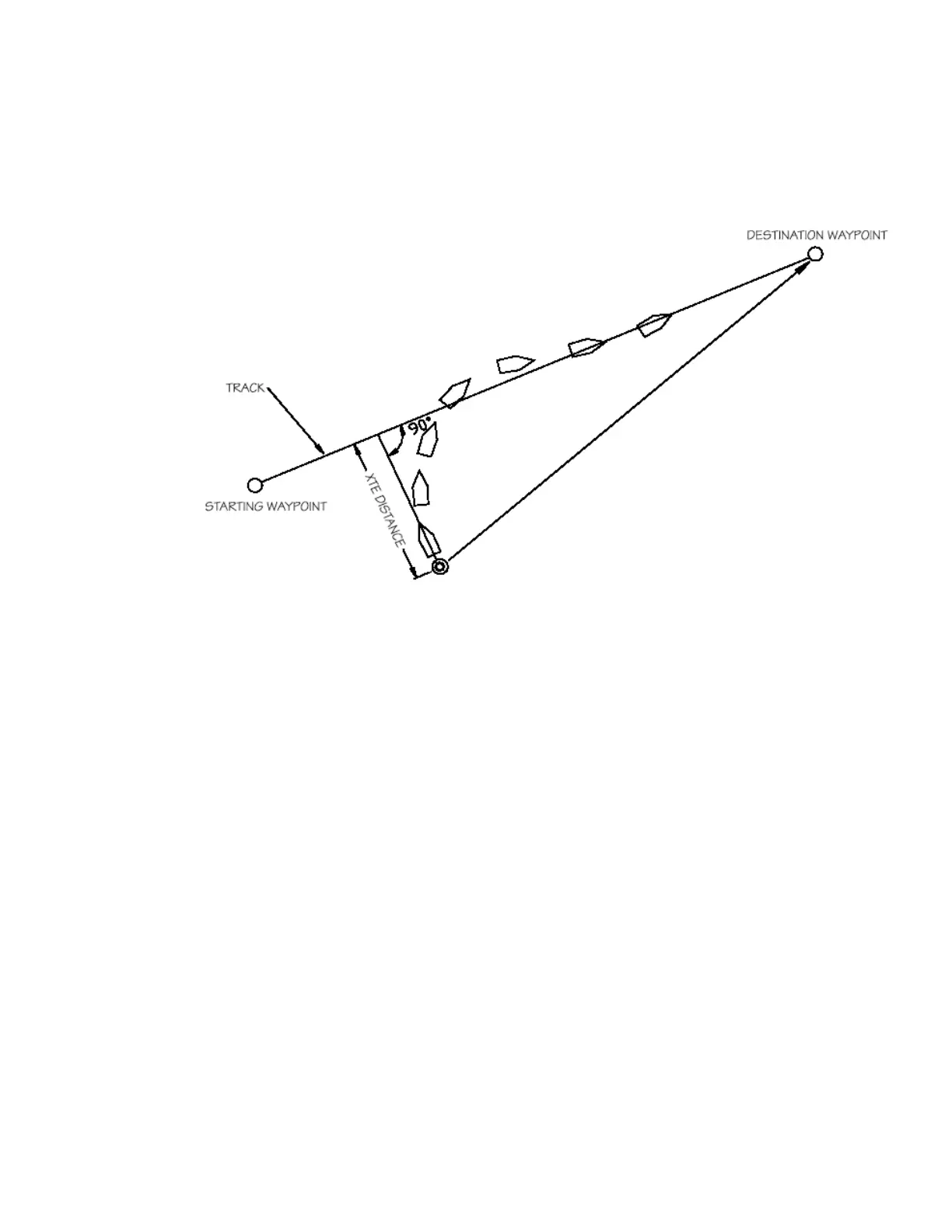
If there is a large cross-track error, the autopilot may overshoot the intended track. This is a
function of turn rate, vessel speed, and position updates received from the Navigation
System. For best performance, it is always best to minimize any cross-track error before
putting the autopilot into NAV mode.
Figure 66 – Response of Vessel to a Large Cross-Track Error
The total number of degrees that the autopilot will correct the heading received from the
Navigation System as it tries to bring the vessel back on track is limited to the value set for
“XTE Limit” in the Nav menu.
Caution! Be sure to maintain a sharp lookout to ensure that there are no obstacles
between the vessel and the original track.
Correction set to Both – Steering To/Along a Track
In this method shown in Figure 67, the P4 will bring the vessel onto the track as smoothly
and efficiently as possible. It does this by combining aspects of steering, using cross-track
error, bearing from original to destination, and bearing directly to the waypoint.