ComNav P4 Installation and Operation
Basic Operations
Document PN 29010100 V1r0 - 147 -
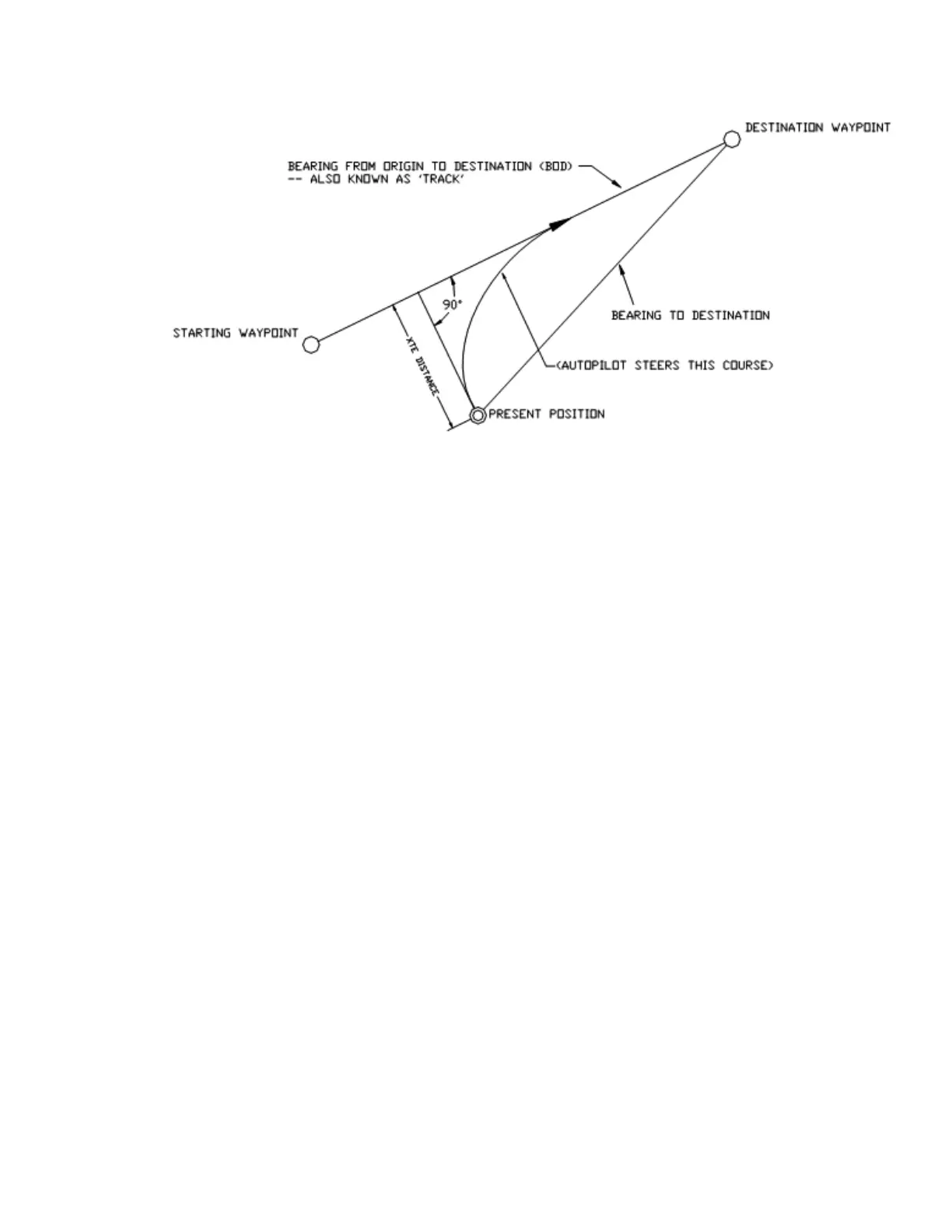
Figure 67 – Steering with Correction set to Both
When steering along a track, the P4 tries to minimize cross-track error by steering to a heading
that lies between the perpendicular to the track and the destination waypoint. The farther you are
off track, the closer to the perpendicular the heading will be. As you come closer to the track, the
heading of the vessel will change closer to the heading of the track. When you are on-track, the
vessel’s heading and the track heading will be identical.
The total number of degrees that the autopilot will correct the heading received from the
Navigation System as it tries to bring the vessel back on track is limited to the value set for “Max
Correction” in the Nav menu.
You can test out how well the P4 steers along a track by following these steps:
1) Make sure the Navigation System is turned on and that a waypoint is programmed in.
Usually this means selecting a waypoint from a list and pressing the ”GOTO” button.
2) Steer the boat close to the waypoint track.
3) Put the P4 in NAV mode by pressing and holding the NAV button until the unit beeps,
and the letter “N” appears in the upper left portion of the display.
4) Observe the vessel’s response for several minutes (if the vessel seems to be
continually falling off course away from the track, change “XTE Sense” (cross-track
error sense) in the Nav menu from “NORM” (normal) to “REV” (reverse) and observe
any performance differences).
5) Verify correct operation by steering back to the original track and then putting the
autopilot into NAV mode again.
6) Observe the vessel’s response as before. If the vessel is wandering back and forth
but there are no alarms on the autopilot or Navigation System, the most common
cause is poor signal quality in the sensor or antenna wiring of the Navigation System.
This may be due to:
Improper grounding
Electrical noise generated in the vessel (alternators, power packs, etc.)
Poor antenna location
Refer to the Navigation System’s manual for signal quality measurements, and ideas on
making improvements.