6159930310_07_01/2016 - 33 -
7.9.3 - Motor control - loosening
• Tap the screen and ll in the values.
- speed
- acceleration time
7.10 - Prevailing
The prevailing step allows you:
- to check the residual torque (prevailing torque) of a
mechanical assembly (e.g. gearboxes, crankcases).
- to know if there is a mechanical «hard» spot in the
assembly.
- to detect the absence of a component in the joint (e.g.
crankshaft or connecting rod bearing shell, gear, control
of the friction torque of a Nylstop nut), when the residual
torque is lower than the min. torque.
• Tap «Strategy».
• Select the type of strategy:
7.10.1 - Forward prevailing
In a forward prevailing step, the start and stop can be
controlled by angle.
This allows you to eliminate the “shock” when starting motor
and mechanism.
- The torque is measured from start.
- The angle is measured from a prevailing threshold.
- The torque value is monitored from a start angle value up to
an end angle value.
- The prevailing torque value must lie between min. and max.
torque.
The stored results include the min. and max. torque values
and the average value of the torque measurements during
the acquisition phase. The system stops the acquisition of the
torque and angle values when the motor stops. The torque
pulse at the motor stop is not taken into account.
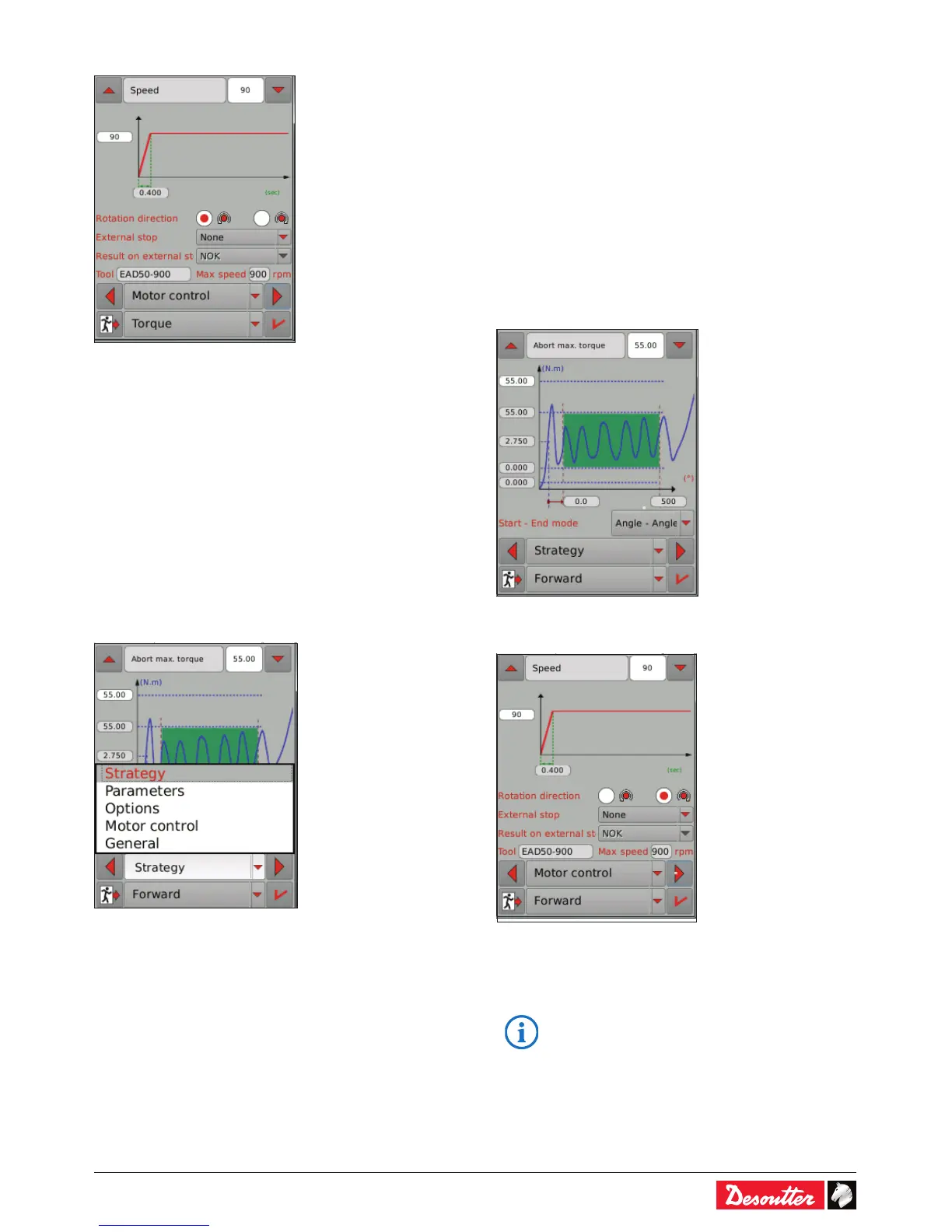
7.10.2 - Motor control - forward prevailing
• Tap the screen and ll in the values.
- speed
- acceleration time
• Select the Rotation direction: Clockwise / Counterclockwise.
• Refer to chapter 7.7 for the settings of the
options.

 Loading...
Loading...











