6159930310_07_01/2016- 34 -
7.10.3 - Prevailing parameters
• Tap «Parameters».
• Select the prevailing torque value to monitor:
The report is OK when the mean of all torque
values during the measuring period is between
"min torque" and "max torque".
The report is OK when the lower torque value
during the measuring period is between "min
torque" and "max torque".
The report is OK when the higher torque value
during the measuring period is between "min
torque" and "max torque".
The report is OK when all torque values during
the measuring period are between "min torque"
and "max torque".
• Tick "Display NOK values" to store and display
min. or max. torque measurement in case of
By default, the prevailing torque average value is
displayed and stored.
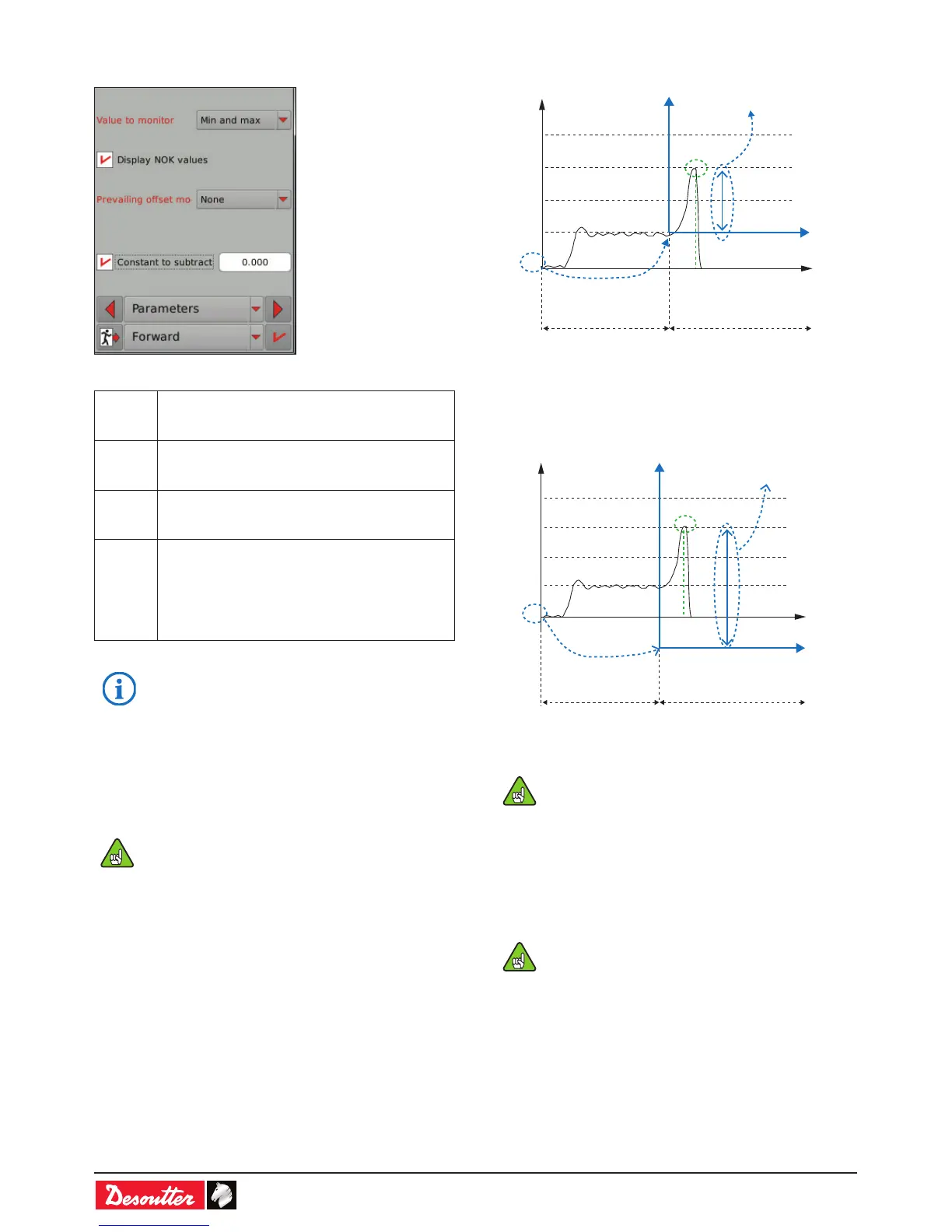
Option 1 - Prevailing offset mode
• Select the «Prevailing offset mode»: none/add/substract.
The average value of the prevailing torque is used as an
offset to be added or subtracted from the torque transducer
reading for the next steps of the Pset.
Step settings and values are not changed. The
offset is applied to the torque transducer reading.
Prevailing and Tightening - Add offset (without constant)
Target (15 Nm) - Average (5 Nm) =
Final torque from the new origin
Nm
Torque
Time
Target
torque
reached
Change the origin at
the average value
Sec
5
0
10
15
20
Prevailing
step
Tightening
step
Prevailing and Tightening - Subtract offset (without
constant)
Real torque = 20 Nm =
Target (15 Nm) + Average (5 Nm) =
Final torque from the new origin
Nm
Torque
Time
Prevailing
step
Tightening
step
Target
torque
reached
Change the origin at
the average value
Sec
5
-5
0
10
15
20
For the next steps of the Pset, it will be possible to
reset the applied Prevailing torque offset by ticking
"Offset reset" in the screen «7.4 - Monitoring &
options».
Option 2 - Constant to «Substract»
• Tick «Constant to substract» and enter a torque value
which will be subtracted from the torque transducer reading
at the beginning of the Prevailing step.
For the next steps of the Pset, it will be possible to
erase this constant offset from the torque transducer
reading by ticking "Offset reset" in the screen «7.4 -
Monitoring & options».

 Loading...
Loading...











