7 Pilot devices M22-SWD…
7.2 M22-SWD front mount
SmartWire-DT module IP20 01/20 MN05006001Z-EN www.eaton.com 187
Field bus Ethercat
Please note the general information for configuring parameters
→ Chapter 12 “Using SWD modules with the EtherCAT field bus”, page
247, particularly
→ Section “ Device options”, page 247.
Device index: sub-index 22
Parameter data length: 0x07.
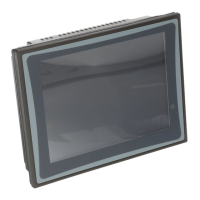
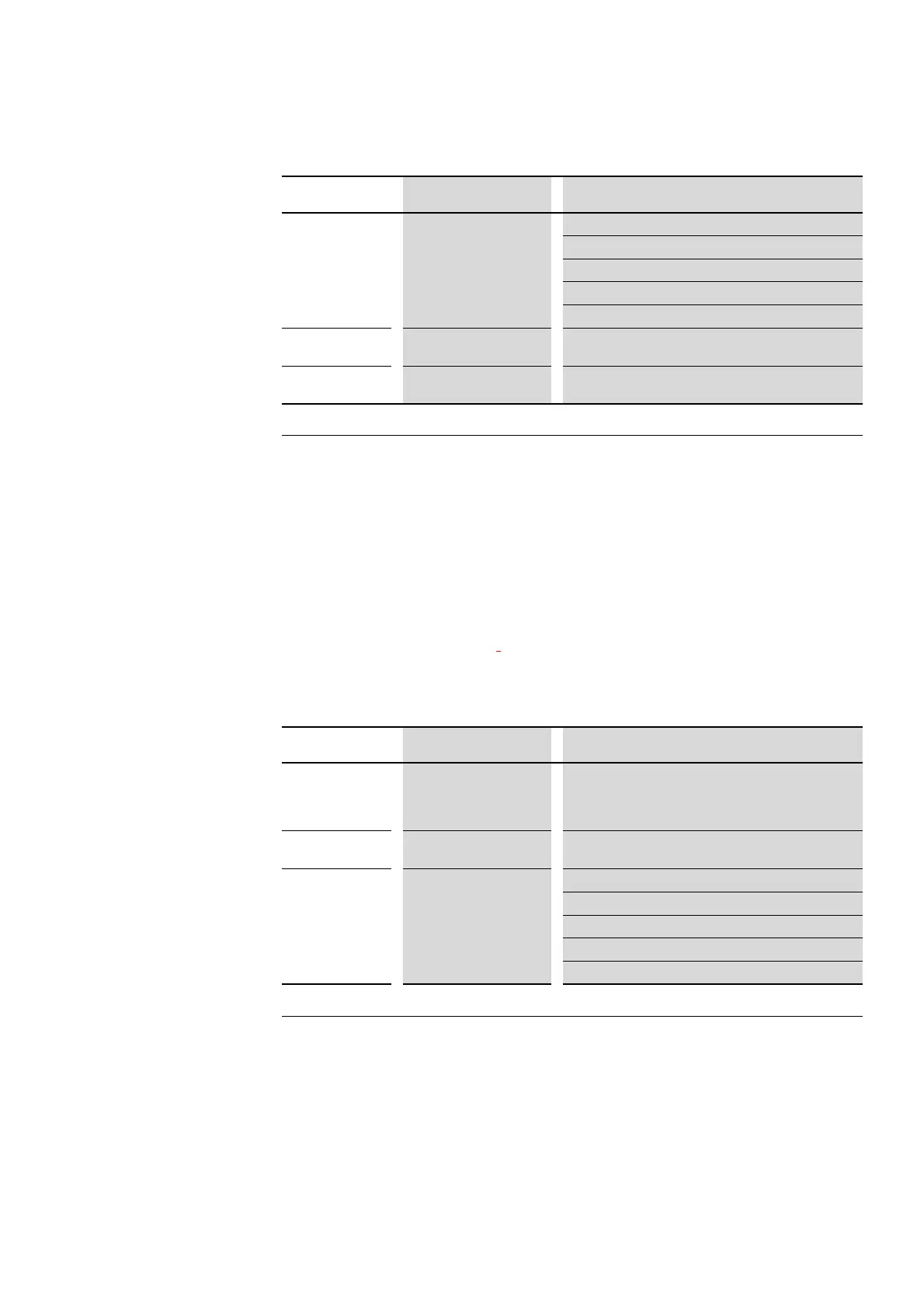
Structure of parameter byte 1:
Table 51: Structure of parameter byte 0
4, 5
Scroll speed Bit 4 Bit 5
0 0 = Increase every detent
0 1 = Increase every 2 detents
1 0 Increase every 4 detents
1 1 = Increase every 8 detents
6
Reset with pushbutton 0 = Off
1 = On
7
Suppress 0x2E diagnostics 0 = "Pushbutton fault" (0x2E) will be signaled
1 = "Pushbutton fault" (0x2E) will not be signaled
Bit
Function Configuration
0 Count direction 0 = The count will increase when the encoder is turned
clockwise
1 = The count will increase when the encoder is turned counter-
clockwise
1
Quick scrolling 0 = Off
1 = On
2, 3
Reading refresh rate Bit 2 Bit 3
0 0 20 ms
0 1 100 ms
1 0 200 ms
1 1 500 ms
Bold values indicate the default settings.
Bit
Function Configuration
Bold values indicate the default settings.
 Loading...
Loading...