Shenzhen Hpmont Technology Co., Ltd. Chapter 8 Troubleshooting and Maintenance
HD5L-PLUS Series User Manual V1.0 89
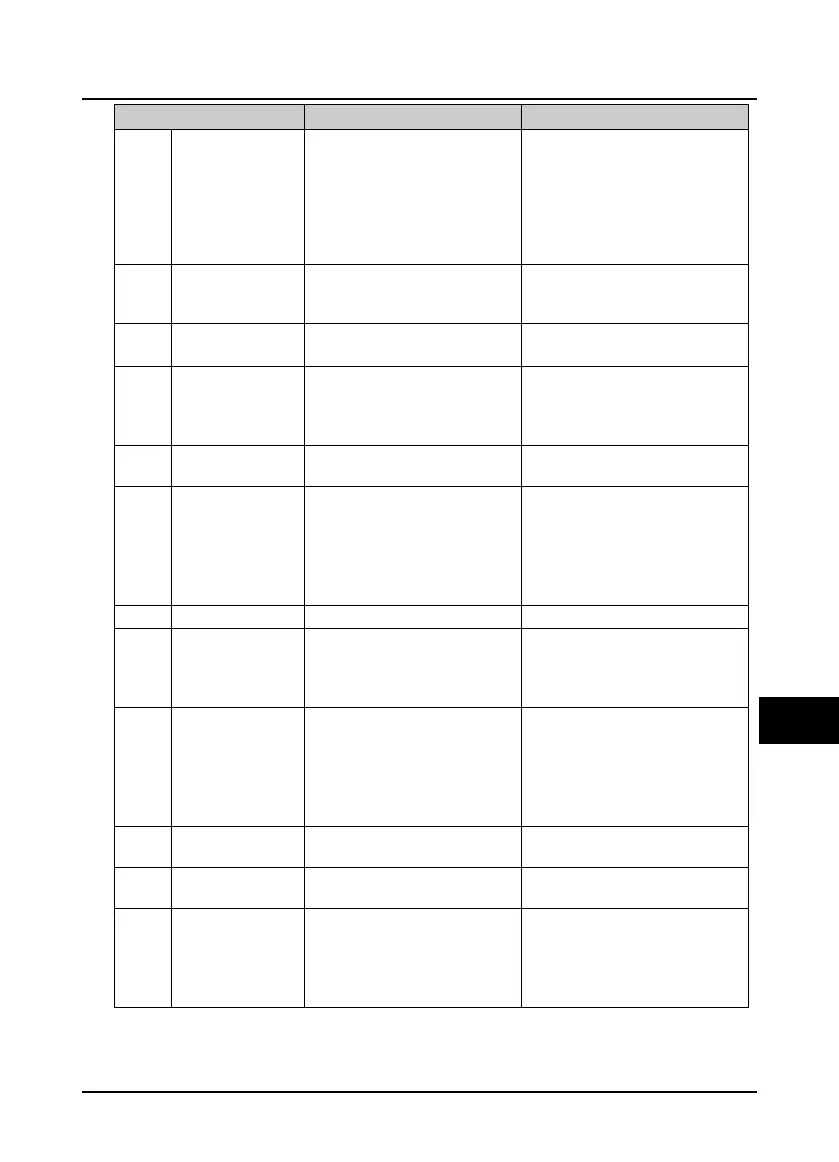
Fault Fault Reasons Counter-measures
E20
Motor overheat
• Motor overheat
• Motor overheat terminal (DI or AI
terminal) connects incorrectly
• The setting of motor paramteter is
incorrect
• Reduce the load; Increas the
Acc./Dec. time; Repair or replace the
motor
• Detect whether the overheat
detection input signal is correct
• Set the motor parameter according
to nameplate
E21
Read/Write fault of
control board
EEPROM
• Memory circuit fault of control
board EEPROM
• Contact the supplier for repairing
E22
Read/Write fault of
keypad EEPROM
• Memory circuit fault of keypad
EEPROM
• Replace the keypad
Contact the supplier for repairing
E23
Faulty setting of
parameters
• The power rating between motor
and controller is too different
• Improper setting of motor
parameters
• Select a controller with suitable
power rating
• Set correct value of motor
parameters
E24
Fault of external
equipment
• Fault terminal of external
equipment operates
• Check external equipment
E25
Too small running
current
• Improper setting of F16.14, F16.15
• Correct the setting of F16.14, F16.15
• Check the connection between
HD5L-PLUS and motor
• Detect HD5L-PLUS whether output
• Detect whether the output
contactor work is normal
E26
Internal logic error
Contact the manufacturer
Contact the manufacturer
E28
SCI communication
timeout
• Connection fault of
communication cable
• Disconnected or not well
connected
• Check the connection
E29
SCI communication
error
• Connection fault of
communication cable
• Disconnected or not well
connected
• Communication setting error
Communication data error
• Check the connection
• Check the connection
• Correctly set the communication
format and the baud rate
• Send the data according to Modbus
protocol
E30
Encoder reverse
• Encoder wire phase and motor
phase do not match
• Set the reverse value of F11.02
E31
Encoder
disconnection
• The encoder has no input signal • Check the encoder connection
E32
Motor over speed
• Encoder pulse number setting
error
• Inadequate controller torque
• Speed-loop PI parameter setting is
incorrect
• Set proper encoder pulse number
• Select bigger capacity controller
• Correctly set speed-loop PI
parameter
 Loading...
Loading...