ecification
The target position data, acceleration/deceleration data, speed data, positioning band data and push-current limiting value
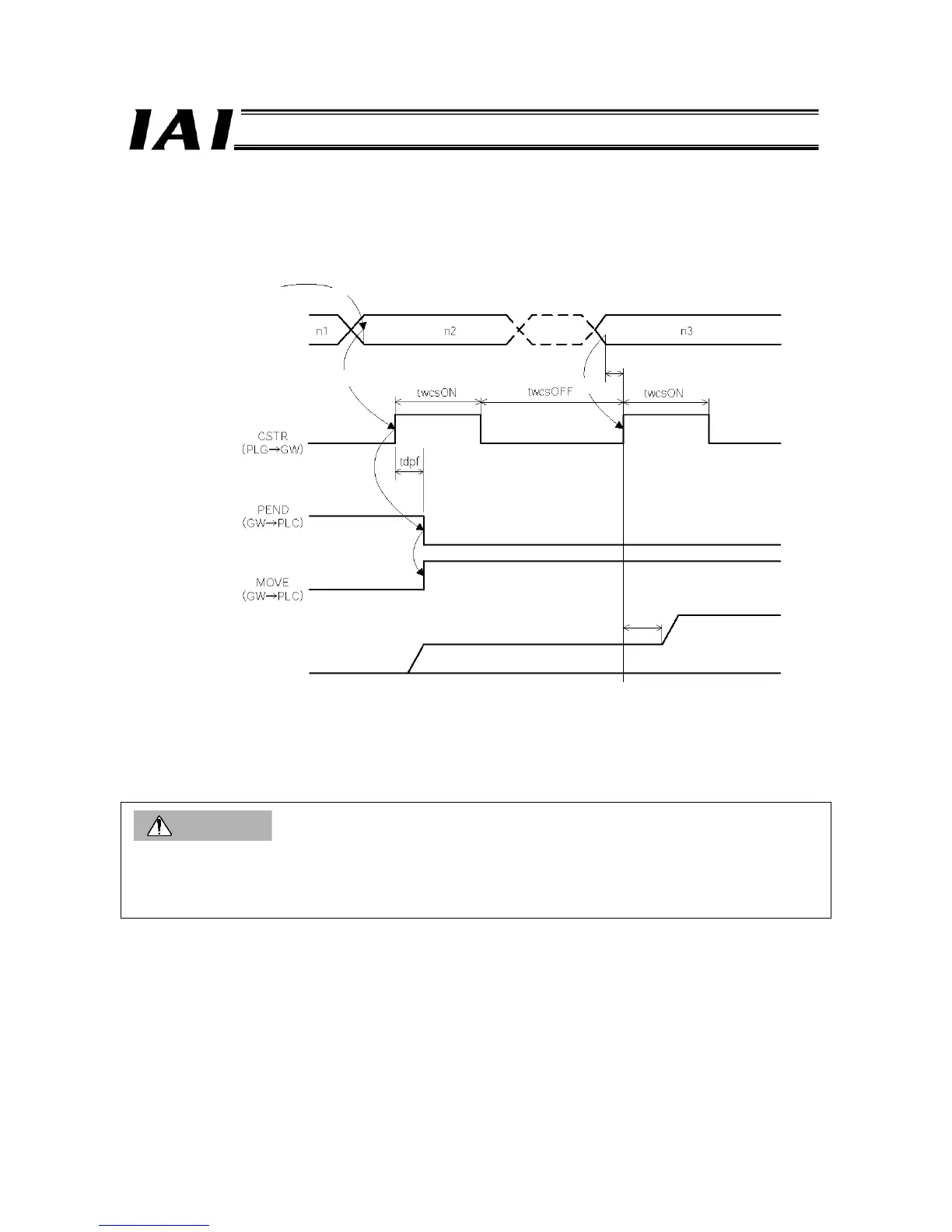
data can be changed while the actuator is moving. To do so, turn the CSTR “1” (ON) and keep it “1” (ON) for tdpf or more after
the data has been changed.
Also provide an interval of 1 Mt or more after the CSTR is turned “0” (OFF) until it is turned “1” (ON) again.
An example of changing the speed and acceleration/deceleration is shown below.
*1 twcsON ≥ 1Mt
*2 twcsOFF ≥ 1Mt
Caution
1. If speed data is not set, or the set speed is “0,” the actuator will remain stopped and no alarm will generate.
2. The speed data setting is changed to “0” while the actuator is moving, the actuator will decelerate to a stop.
3. Target position data must be set even if you only want to change the acceleration/deceleration or speed data.
4. Acceleration/deceleration and speed data must be set even if you only want to change the target position data.
[1]
[2]
[3]
≥ 0

 Loading...
Loading...




