ecification
(6) Operation by Solenoid Valve Mode 1
Enter the position data into the position table in the controller in advance, and specify the position number with the link
register on PLC and operate.
Operation
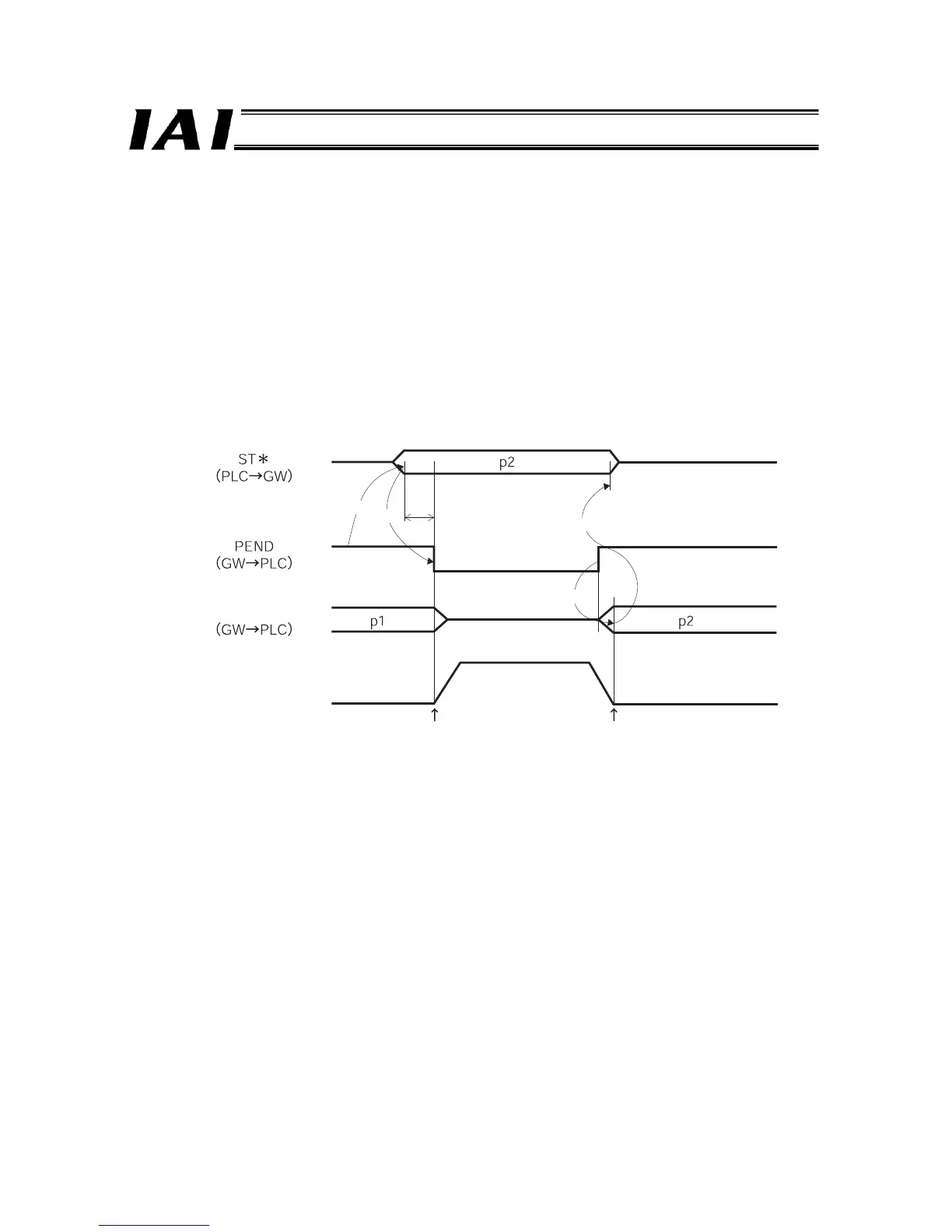
[1] Be sure that the positioning complete (PEND) is on “1” (ON), and change the ST* signal corresponding to the
position number that contains the target position of the command position number register that you desire to
operate from “0” (OFF) to “1” (ON).
[2] After a movement is started, PEND turns to “0” (OFF) when tdpf is complete.
[3] PEND will turn to “1” (ON) when the remaining travel amount is within the positioning band that is set in advance,
and movement complete (PE*) will be output. Therefore, confirm the movement complete (PE*) read at the
positioning complete in a while after PEND turns to “1” (ON).
[4] After confirming the output of movement complete (PE*), rewrite the command position number resister to 0 or a
next command position number.
*1 Yt+2Mt+Xt ≤ tdpf ≤ Yt+2Mt+Xt+7 (ms)
Command position
Number
Positioning complete
Movement complete
Actuator operation
Movement start position Target position
*1
tdpf
[1]
[2]
[4]
[3]

 Loading...
Loading...




