ecification
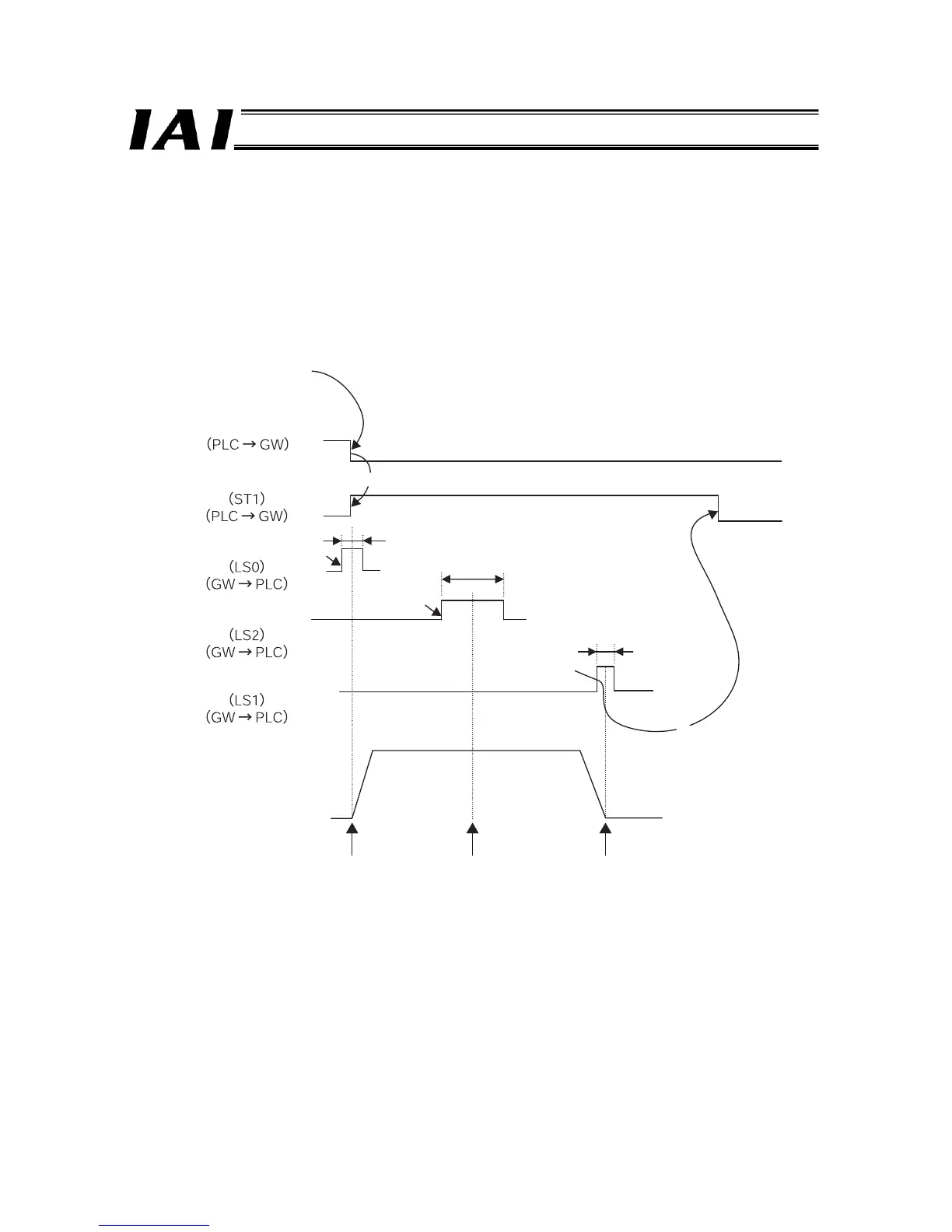
(7) Operation by Solenoid Valve Mode 2
Enter the position data into the position table in the controller in advance, and specify the position number with the link
register on PLC and operate.
Operation
[1] Turn to “0” (OFF) for all the movement commands.
[2] Turn a movement command to “1” (ON). (Front end move command for the example below.)
[3] Each position detecting output is generated when the actuator’s current position reaches the positioning band
range of +/- value that was set in the position table.
[4] Switch the movement command to “0” (OFF) after confirming that the position detecting output of the target
position (front end position detecting output for the example below) is turned to “1” (ON).
Rear end move
command input (ST0)
Intermediate point move
command input (ST2)
Front end move
command input
Rear end position
detecting output
Intermediate position
detecting output
Front end position
detecting output
Actuator movement
Positioning band of
the position No. 0
Positioning band of
the position No. 2
Positioning
band of the
position No. 1
Rear end Intermediate point Front end
[1]
[2]
[3]
[3]
[3]
[4]

 Loading...
Loading...




