ecification
[4] When the push direction is set incorrectly
If the push direction is set incorrectly, the actuator position will deviate by “positioning band x 2,” as shown below.
Exercise caution.
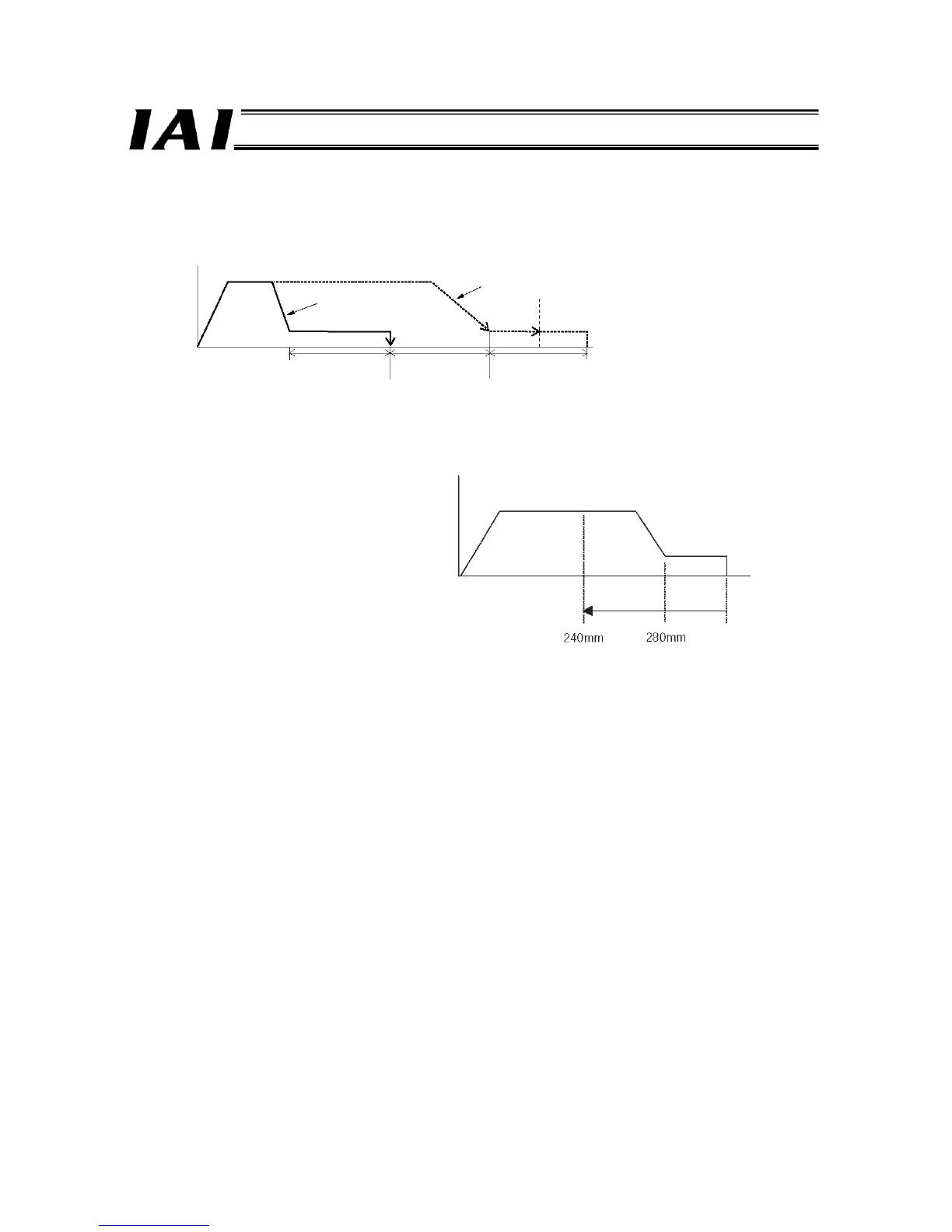
[5] When the return operation after push is specified in relative coordinates
Take note that when relative coordinate
specification is used, the reference
position is not the current position at
which the actuator is stopped after
completing the push operation, but the
target position under the position number
based on which the push operation was
executed.
In this example, setting the position
number as -40 mm in relative coordinates
will cause the actuator to move to the
position at 240 mm (280 – 40).
If the push mode is specified, the actuator
will execute an incremental move from the
stopped position.
Speed
Travel
distance

 Loading...
Loading...




