ecification
(2) Pause
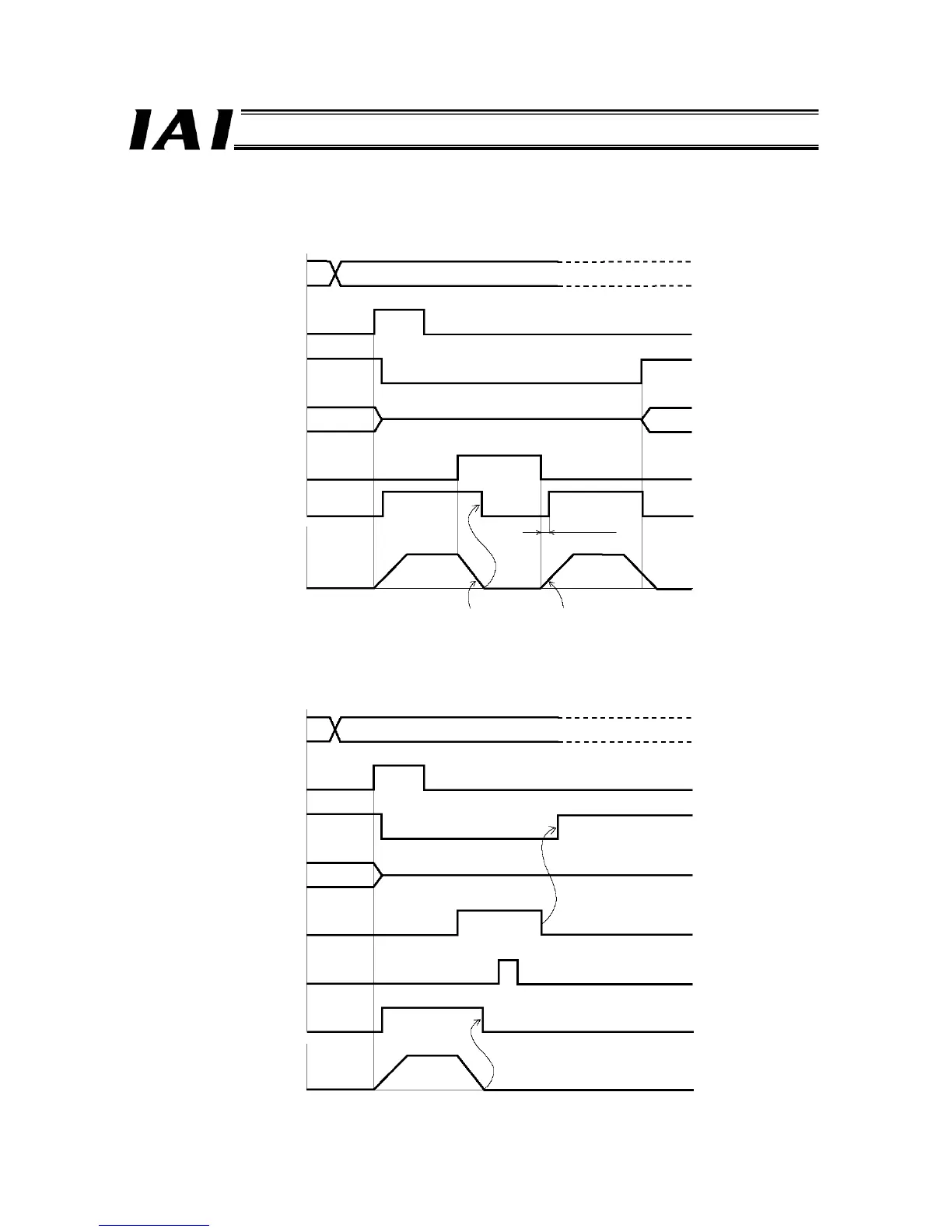
When the pause command signal (STP) is turned “1” (ON) while the actuator is moving, the actuator will decelerate to a
stop.
Since the remaining travel distance is retained, the remaining travel can be resumed by turning the STP “0” (OFF) again.
The remaining travel can be cancelled by turning the reset signal (RES) “1” (ON) while the actuator is paused. When the
cancellation of the pause command (STP) is recognized thereafter, the position complete signal (PEND) will turn “1”
(ON) within approx. 1 msec.
(The command is cancelled upon detection of the leading edge of the reset signal.)
Command position
Position start
(CSTR)
Position complete
(PEND)
Moving (MOVE)
Actuator movement
Completed position
Pause command
(STP)
4 msec Max
Decelerate to a stop Start of remaining travel
Speed
Command position
Position start
(CSTR)
Position complete
(PEND)
Moving (MOVE)
Actuator movement
Completed position
Pause command
(STP)
Speed
Reset (RES)

 Loading...
Loading...




