ecification
z Ball Screw Lead (No. 77, LEAD)
This parameter defines the ball screw lead.
Before shipment, this parameter has been set to a value appropriate for the characteristics of the actuator.
* Do not change this parameter.
z Axis Operation Type (No. 78, ATYP)
This parameter sets whether the actuator is a linear operation axis or rotational operation axis.
0: Linear operation axis
1: Rotational operation axis
z Rotational Axis Mode Selection (No. 79, ATYP)
This parameter sets the rotational operation mode when the axis operation type is set to “rotational operation axis” (Parameter
No. 78 = 1).
0: Normal mode
1: Index mode
[Normal Mode]
Multi-rotational operation can be performed in a range of -9999.99 deg to 9999.99 deg.
[Index Mode]
Rotational operation can be performed in a range of 0 to 359.99 deg.
Caution
[1] Push operation cannot be performed in the index mode. Even if push data is input in the position table, the data will be
ignored and the actuator will perform normal movement. The positioning band will conform to the setting of the default
positioning band parameter.
[2] The index mode cannot be set for axes using a simple absolute R unit.
z Rotational Axis Shortcut Selection (No. 80, ATYP)
Select the shortcut mode if the actuator is a rotational axis operating in the index mode and you want to rotate the actuator in
the direction closer to the target position.
0: Do not select
1: Select
By selecting the shortcut mode, you can rotate the rotational axis in a specific direction.
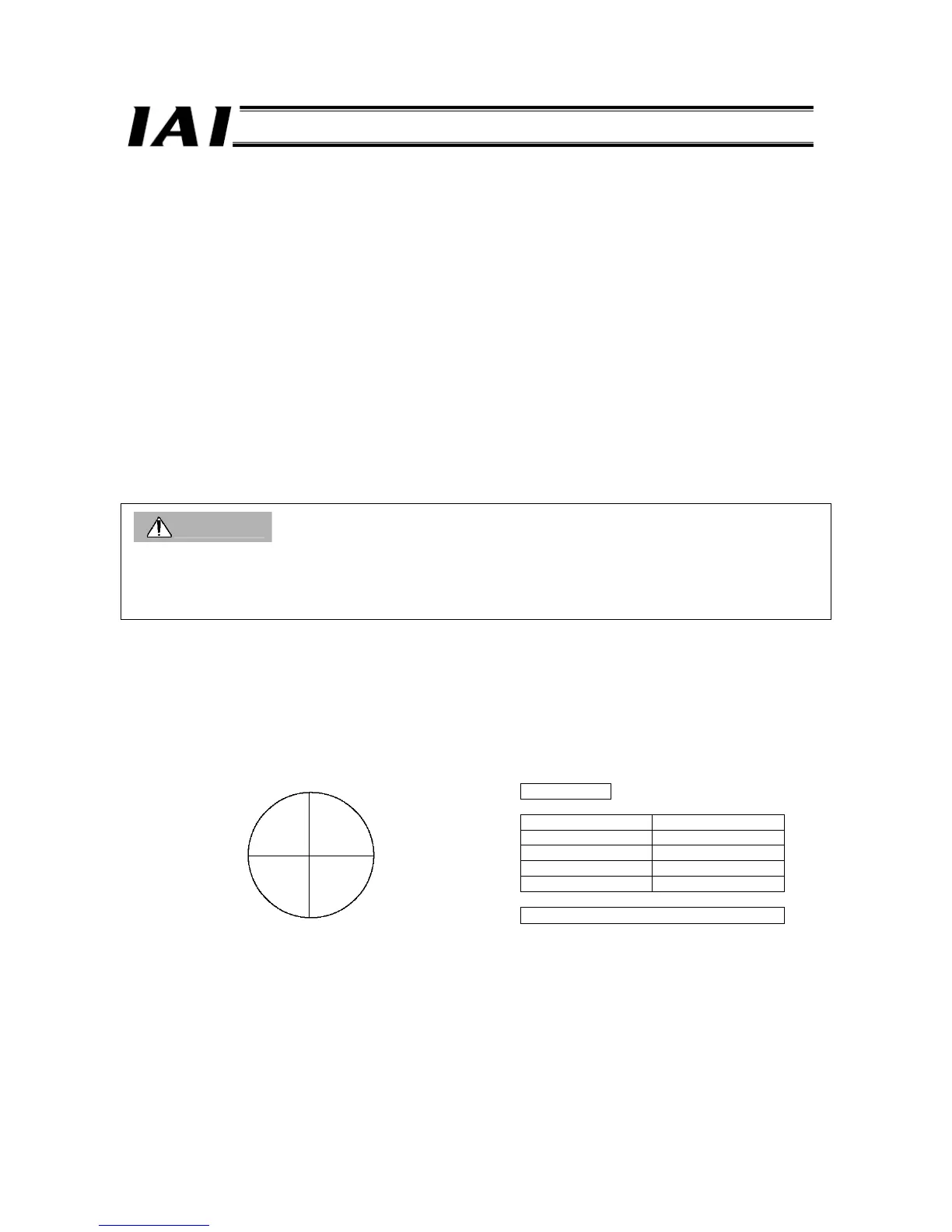
This is explained using an example of position table operation.
Position table
Position No. Position data
1 0
2 90
3 180
4 270
With position data, 1° corresponds to 1 mm.
Position No. 1
Position No. 4 Position No. 2
Position No. 3

 Loading...
Loading...




