ecification
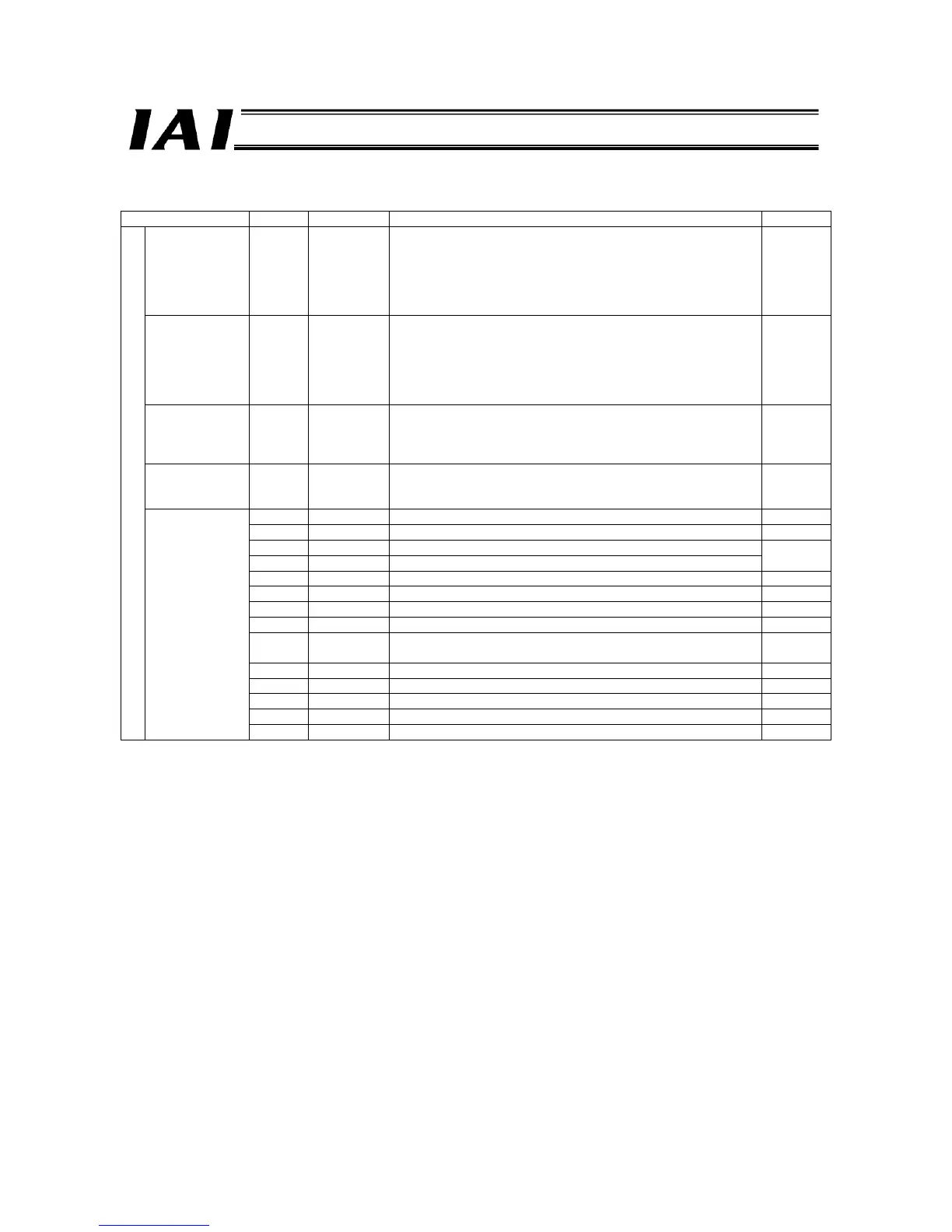
I/O Signal List
Signal type Bit Signal name Description Details
Current position
data
32-bit
data
-
The current position data is output as a hexadecimal number
using a 32-bit signed integer (unit: 0.01 mm).
Example) If the data is +25.4 mm, “000009ECH”
(decimal number: 2540) is output.
z Since a negative value is indicated as a 2’s complement, the
most significant bit becomes “1.”
3.8.3 (5)
Actual motor
current
32-bit
data
-
The actual motor current data is output as a hexadecimal
number using a 32-bit signed integer (unit: mA).
Example) If the data is +1 A (1000 mA), “000003EH8
(decimal number: 1000) is output.
z Since a negative value is indicated as a 2’s complement, the
most significant bit becomes “1.”
3.8.3 (5)
Current speed
16-bit
data
-
Output as a hexadecimal number using a 16-bit integer
(unit: 1.0 mm/sec).
Example) If the data is 200 mm/sec, “00C8H”
(decimal number: 200) is output.
3.8.3 (5)
Alarm code
16-bit
data
-
The present alarm code is output. (The ALM is turned ON.)
Refer to the list in 3.7.5 for the alarm details. Take note that
these are not simple alarm codes.
3.7.5
b15 EMGS Emergency stop mode 3.8.2 (2)
b14 CRDY Controller ready 3.8.2 (1)
b13 ZONE2 Zone output monitor 2
b12 ZONE1 Zone output monitor 1
3.8.2 (13)
b11 - Cannot be used. -
b10 - Cannot be used. -
b9-b7 - Cannot be used. -
b6 - Cannot be used. -
b5 PSFL Missed load in push operation
3.8.3 (5)
3.8.4 (1)
b4 SV Ready (servo ON) 3.8.2 (5)
b3 ALM Alarm present 3.8.2 (3)
b2 MOVE Moving 3.8.2 (8)
b1 HEND Home return complete 3.8.2 (6)
PLC input
Status signal
b0 PEND Position complete 3.8.2 (9)

 Loading...
Loading...




