ecification
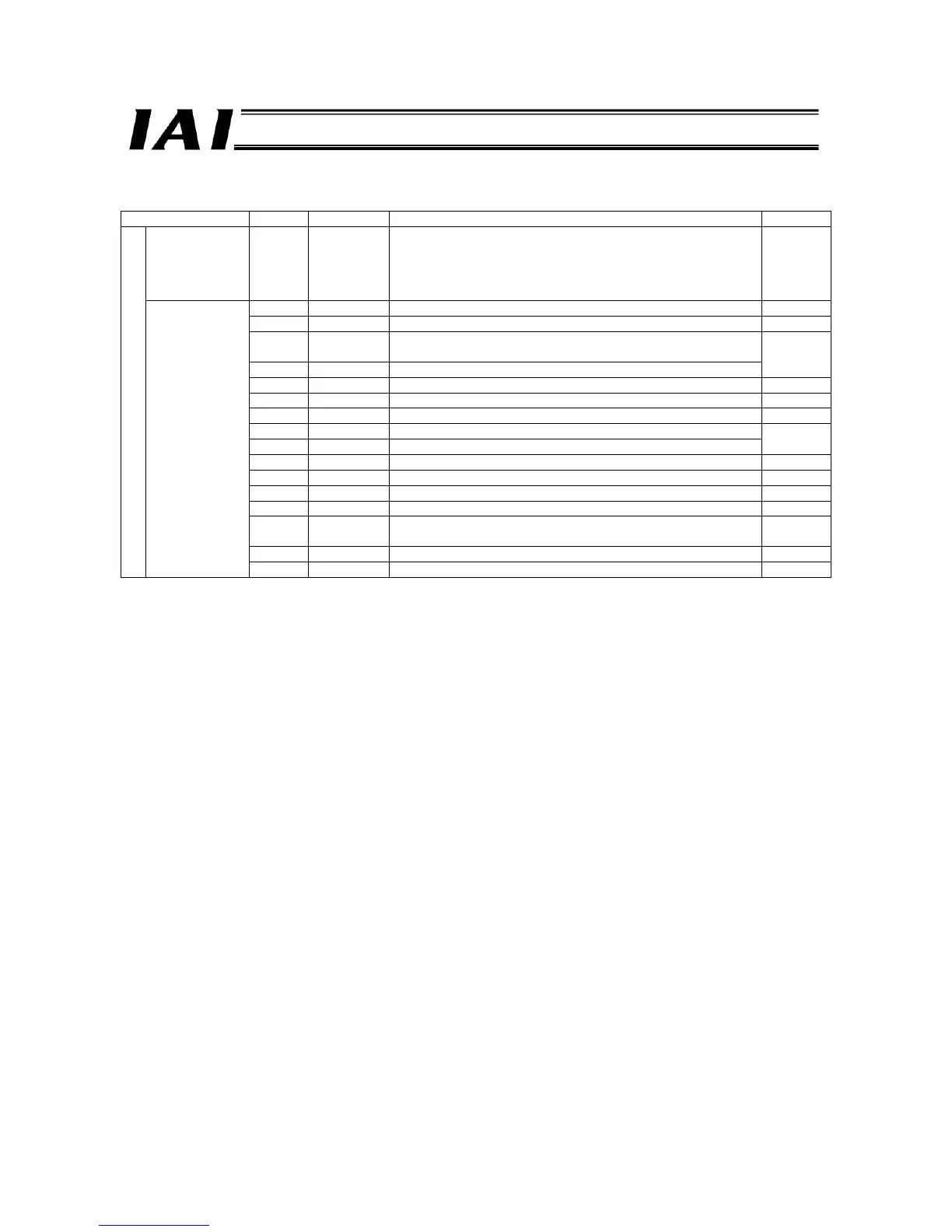
I/O Signal List
Signal type Bit Signal name Description Details
Push-current
limiting value
8-bit
data
-
Set the push-current limiting value as a hexadecimal number
(unit: %) to set the push force.
Settable range is 00H to 1FFH, FFH = 100% and 1FFH = 200%
Example) To set 50%, specify FFH x 50% = 255 x 50% = 127
(decimal number) = “7FH.”
3.8.3 (5)
b15 BKRL Forced brake release 3.8.2 (19)
b14 - Cannot be used. -
b13 DIR Push direction specification
(0 = Home return direction, 1 = Opposite home return direction)
b12 PUSH Push operation mode specification
3.8.3 (5)
3.8.4 (1)
b11 - Cannot be used. -
b10 - Cannot be used. -
b9 - Cannot be used. -
b8 JOG+ Jog+ command
b7 JOG- Jog- command
3.8.2 (14)
b6 JVEL Jogging speed/inching distance switching 3.8.2 (15)
b5 JISL Jogging/inching switching 3.8.2 (16)
b4 SON Servo ON command 3.8.2 (5)
b3 RES Reset command 3.8.2 (4)
b2 STP Pause command
3.8.2 (10)
3.8.4 (2)
b1 HOME Home return command 3.8.2 (6)
PLC output
Control signal
b0 CSTR Start command 3.8.2 (7)

 Loading...
Loading...




