9. Commissioning
MiR100 Hook User Guide (en) 10/2020 - v.3.0 ©Copyright 2016-2020: Mobile Industrial Robots A/S. 124
orients itself so the hook camera is able to read the ID tag before backing towards the cart.
If misaligned more than 5 degrees, the robot may fail to pick up the cart and will abort the
action.
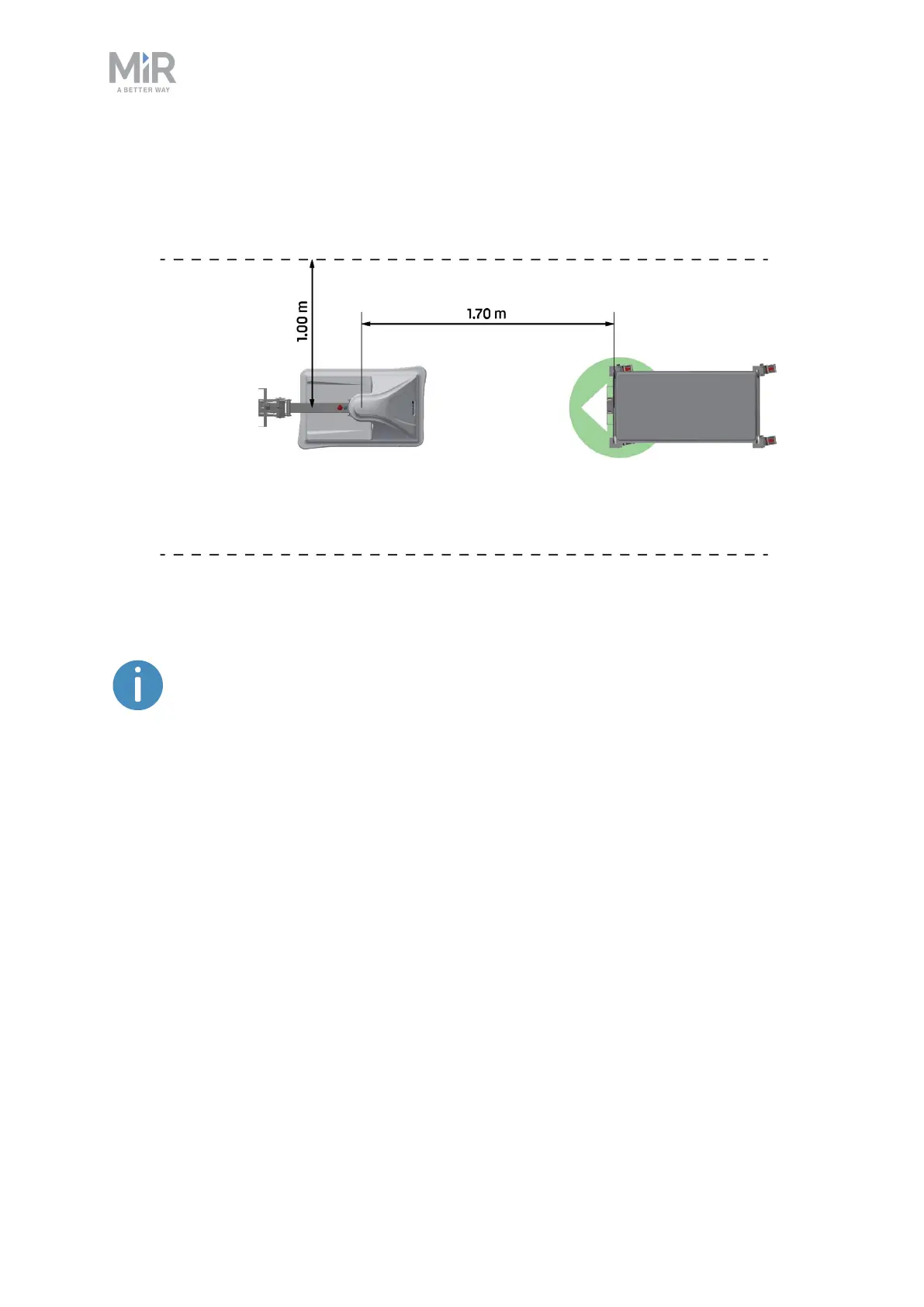
Figure 9.21. Recommended minimum free space around the robot for picking up carts.
Make sure the space around the robot is clear, as the alignment is done
without checking for obstacles. We recommend at least one meter of cleared
area to either side of the robot from its center as shown in Figure 9.21.
Drive with a cart
Once a cart is attached to MiR100, the robot does not reverse when driving to another
position—see Safety on page23. As a result, its dynamic obstacle avoidance capabilities are
somewhat restricted compared to when a cart is not attached. The system operator needs to
keep this in mind when choosing where to run MiR100 Hook.
Turn a corner
The space required to turn a corner depends on the combined length of the robot and cart; a
square measuring the total length of the robot and cart plus 0.5 m is the recommended
minimum space when turning a corner. This is depicted in Figure 9.22.