14
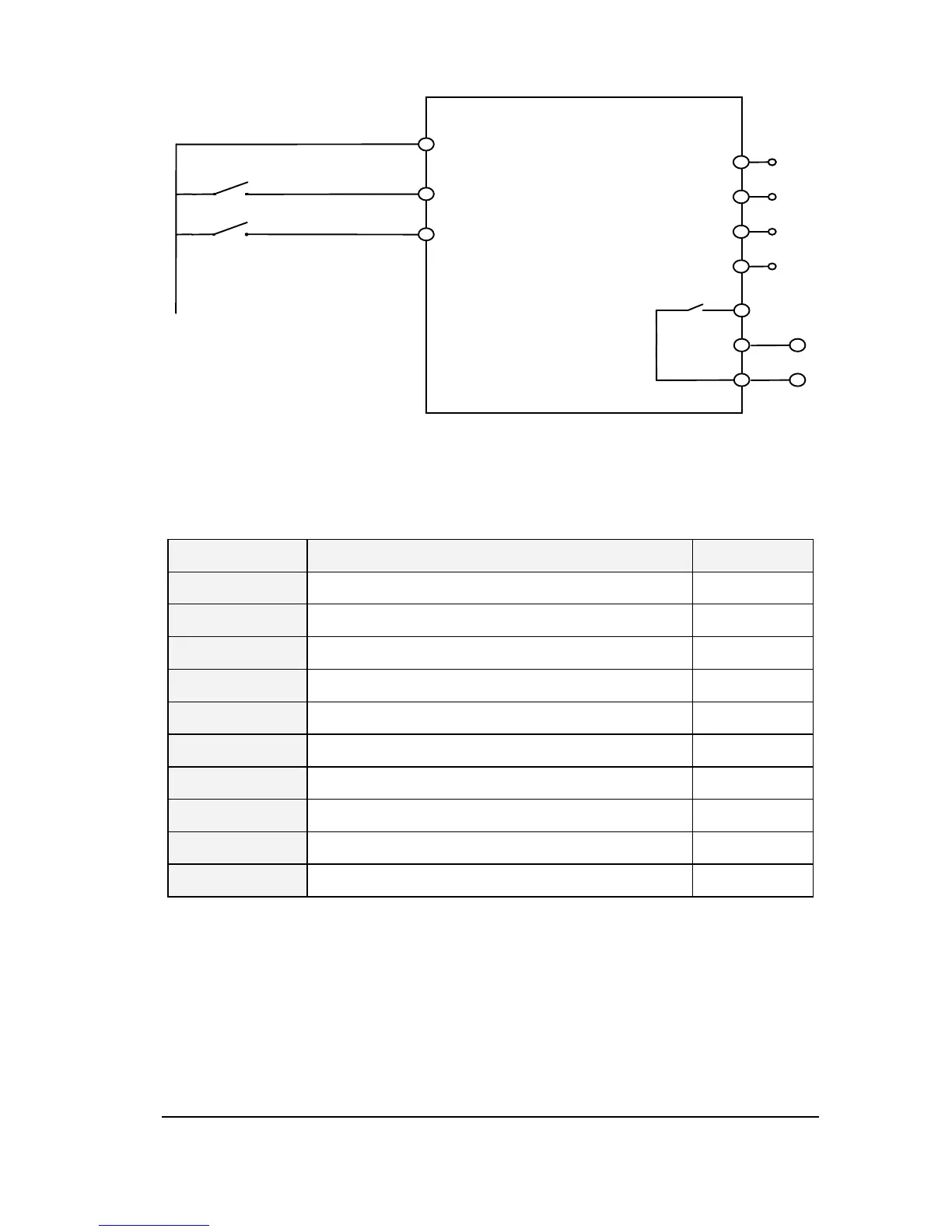
Figure 1.10 Example of wiring for three-wire control running
Table 1.6 Parameter configuration of UP/DOWN acceleration and
deceleration(Negative logic)
Code Parameter Set value
f002 Selection of run command 0
f003 Selection of frequency command selection 5
f301 LI1 logic input function 2
f302 LI2 logic input function 3
f303 LI3 logic input function 23
f304 LI4 logic input function 24
f306 Logic input type selection 1
f309 Forced- effective Logic input function selection 1
f310 Forced- effective Logic input function selection 2 0
f522 Prohibit motor reverse 0
Example 5: Multi-step speed control running(Negative logic)
 Loading...
Loading...