85
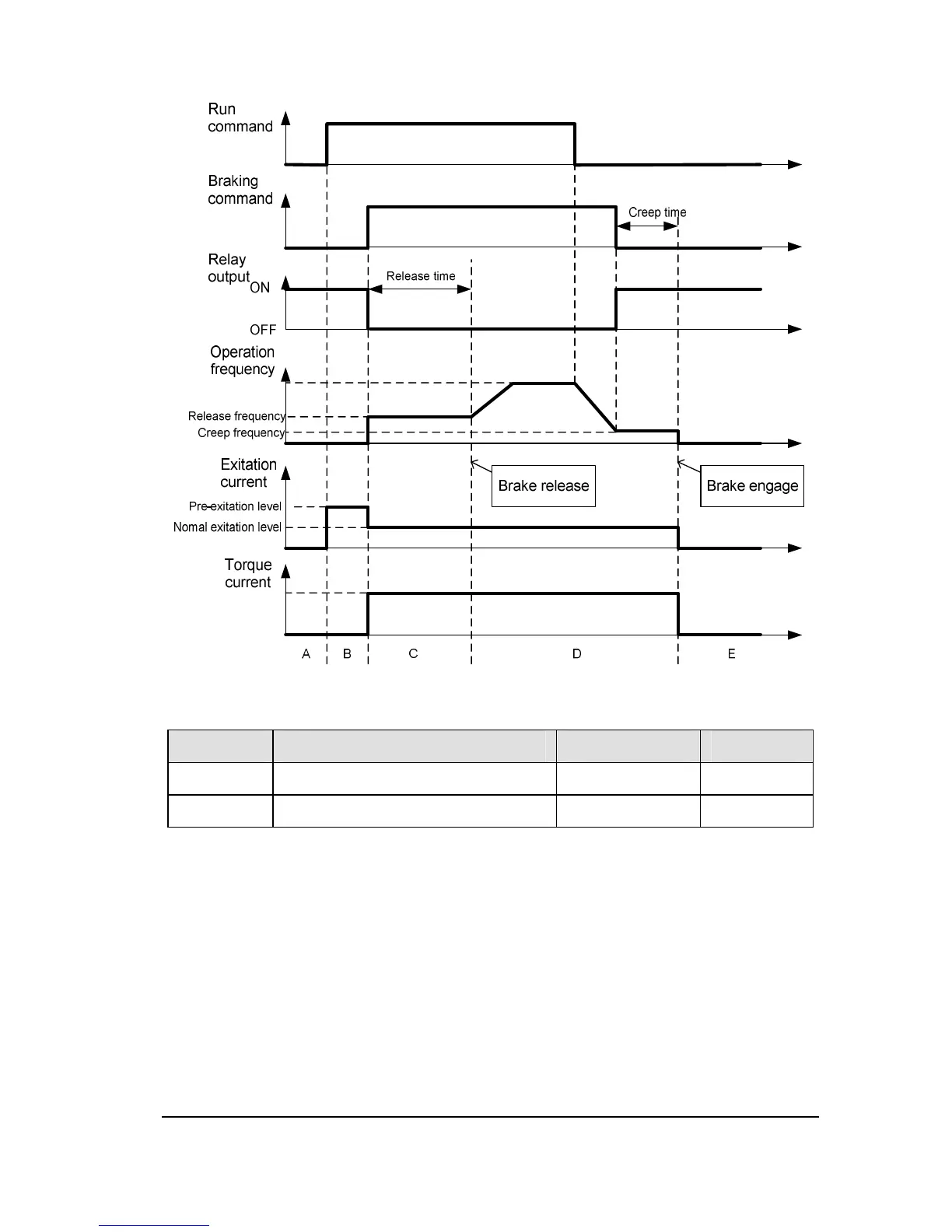
Figure 2.35 Description of braking mode sequence
NO. Parameter Name Setting Range Default
f714 Droop gain 0~100% 0
f715 Droop insensitive torque band 0~100% 10
The droop control function refers to the function of operating the power-running motor at
operating frequency f1 (Hz) that is lower than command frequency f0 (Hz) by droop
frequency Δf (Hz) when the torque current is T1 (%).The droop frequency Δf can be
calculated, using the following expression.
Droop frequency Δf (Hz)= f101 × f714× (Torque current T1 – f715)
When the torque current is above the specified droop insensitive torque band (f715), the
frequency is reduced during power running or increased during regenerative braking.
 Loading...
Loading...