16
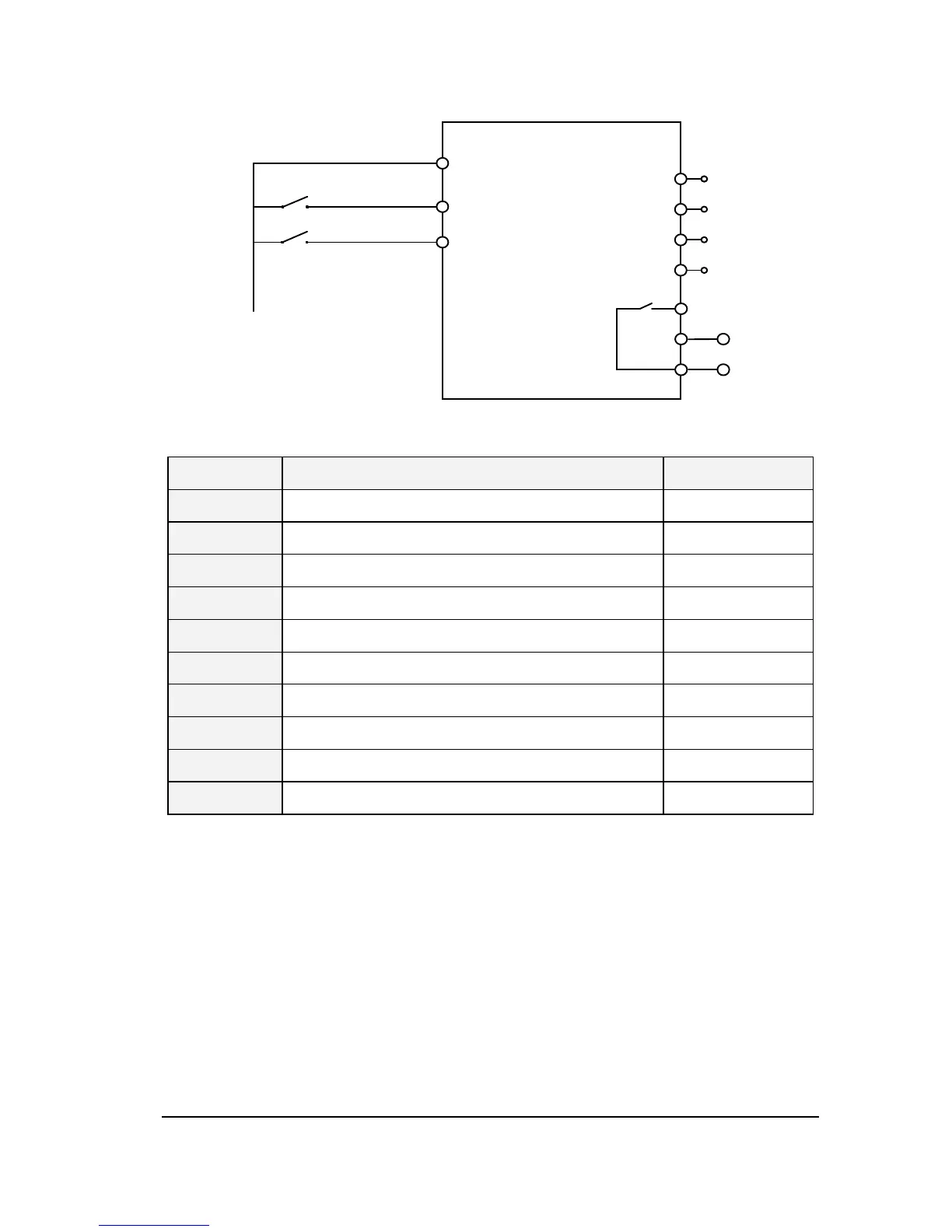
Figure 1.12 Example of wiring for JOG control
Table 1.8 Parameter configuration of JOG control(Negative logic)
Code Parameter Set value
f002 Selection of run command 0
f301 L1 logic input function 2
f302 L2 logic input function 3
f303 L3 logic input function 4
f306 Logic input type selection 1
f309 Forced- effective Logic input function selection 1
f310 Forced- effective Logic input function selection 2
0
f522 Prohibit motor reverse 0
f701 Jog frequency Set by yourself
f702 Jogging stop mode Set by yourself
Multi-step speed
 Loading...
Loading...