Basics of Path Interpolation
2.13 Kinematic adaptation
TO Path Interpolation
62 Function Manual, 11/2010
[
]
\
$ $ $
GLVWDQFH$$ GLVWDQFH$(QGSRLQW
GLVWDQFH$$
.LQHPDWLF
]HURSRLQW
.LQHPDWLF
HQGSRLQW
&DUWHVLDQ
]HURSRL
QW
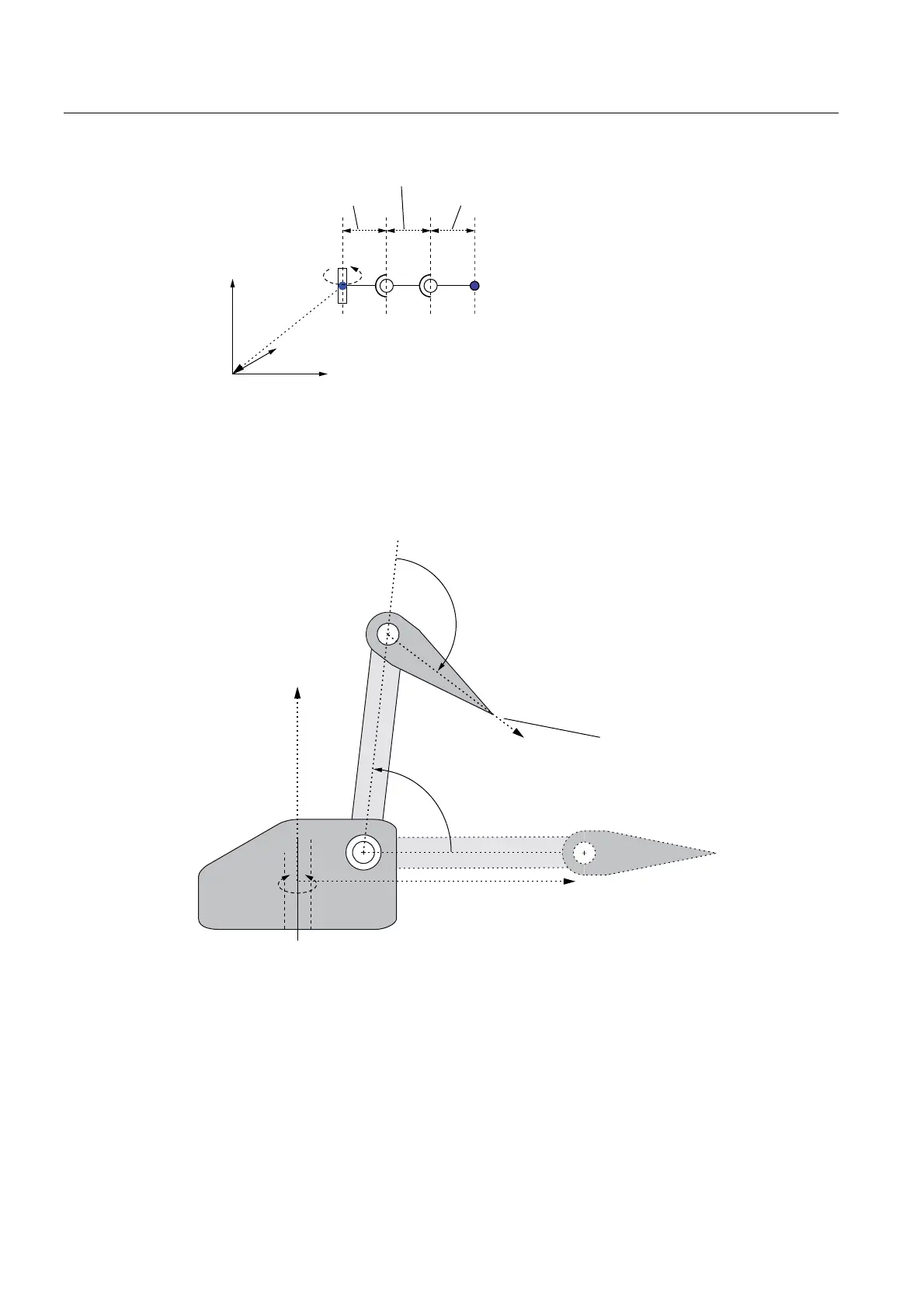
Figure 2-50 Articulated arm: Kinematics
The kinematic zero point lies in point A
1
.
The zero position of the kinematics exists if distanceA1A2, distanceA2A3 and distanceA3EP
point in the Cartesian x-direction.
$
$
[
]
RIIVHW$
RIIVHW$
$
$RIIVHWKDVDQHJDWLYH
YDOXHLQWKLVFDVH
=HURVHWWLQJRI
WKHNLQHPDWLF
.LQHPDWLF
HQGSRLQW
Figure 2-51 Articulated arm: Axes A2 and A3 zero positions

 Loading...
Loading...




