12 Functional Descriptions 09.95
12.30.3 Function description
The output can now be injected either only to the slave or only to the master of the torque
compensation control (see switch in the diagram).
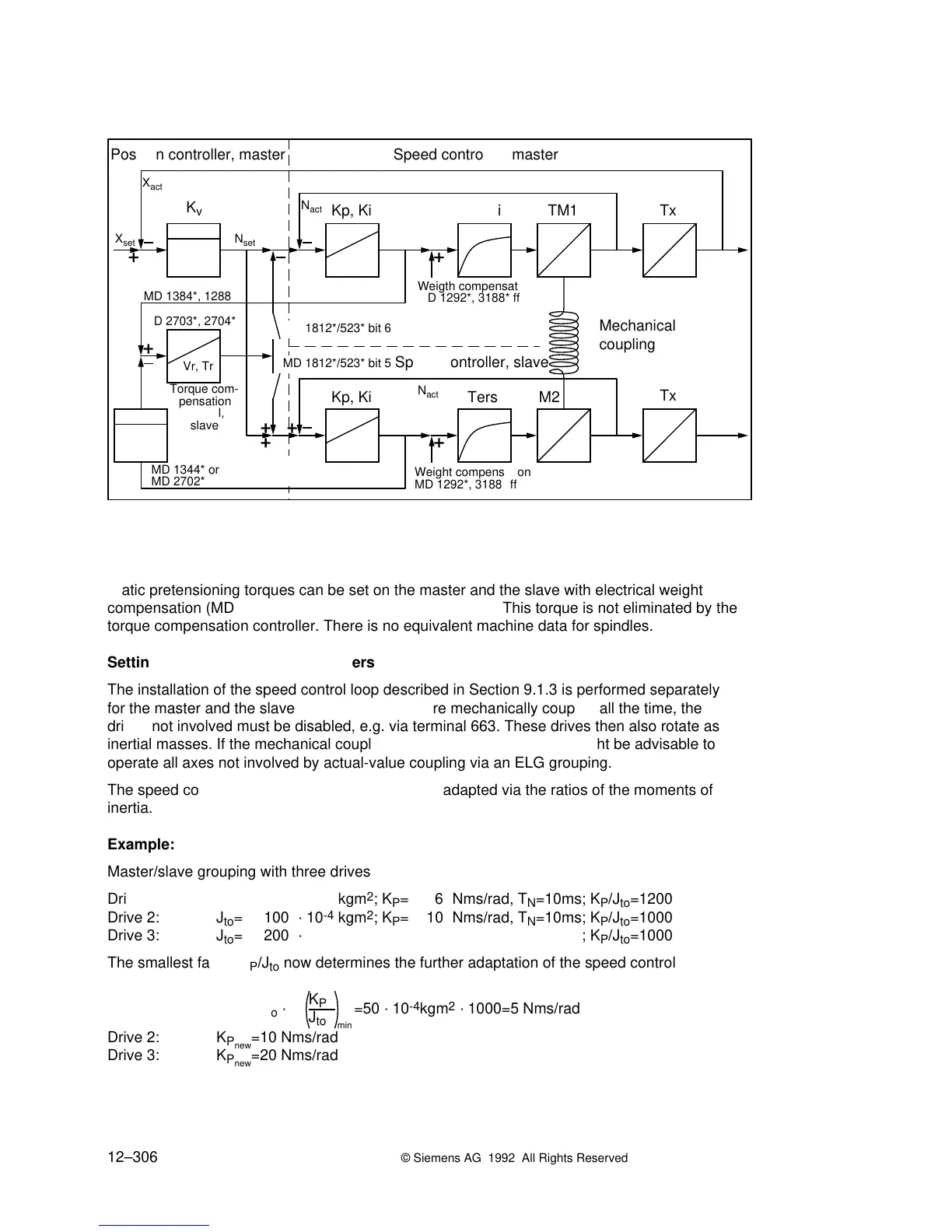
Structure of master/slave with torque compensation control
MD 1812*, bit 7
or MD 523* bit 7
a
a
a
a
a
a
X
set
a
a
a
a
K
v
a
a
a
a
a
a
N
set
a
a
a
a
a
a
N
act
a
a
a
a
a
a
a
a
a
a
a
a
Kp, Ki
a
a
a
a
a
a
a
a
a
a
Tersi
a
a
a
a
a
a
a
a
a
a
TM1
a
a
a
a
Tx
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Kp, Ki
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Tersi
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
TM2
a
a
a
a
Tx
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Weigth compensation
MD 1292*, 3188* ff
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Position controller, master
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Speed controller, master
a
a
a
a
a
a
X
act
a
a
a
a
a
a
N
act
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
MD 1384*, 1288*
or
MD 2703*, 2704*
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Weight compensation
MD 1292*, 3188* ff
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Mechanical
coupling
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Torque com-
pensation
control,
slave
a
a
a
a
a
a
a
a
a
a
Vr, Tr
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
MD 1344* or
MD 2702*
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
Speed controller, slave
MD 1812*/523* bit 5
MD 1812*/523* bit 6
Static pretensioning torques can be set on the master and the slave with electrical weight
compensation (MD 1292*, MD3188*) of the parameter set. This torque is not eliminated by the
torque compensation controller. There is no equivalent machine data for spindles.
Setting the speed control parameters
The installation of the speed control loop described in Section 9.1.3 is performed separately
for the master and the slave drives. If all drives are mechanically coupled all the time, the
drives not involved must be disabled, e.g. via terminal 663. These drives then also rotate as
inertial masses. If the mechanical coupling is made via a wormgear it might be advisable to
operate all axes not involved by actual-value coupling via an ELG grouping.
The speed control gains that can be achieved are adapted via the ratios of the moments of
inertia.
Example:
Master/slave grouping with three drives
Drive 1: J
to
= 50 · 10
-4
kgm
2
; K
P
= 6 Nms/rad, T
N
=10ms; K
P
/J
to
=1200
Drive 2: J
to
= 100 · 10
-4
kgm
2
; K
P
= 10 Nms/rad, T
N
=10ms; K
P
/J
to
=1000
Drive 3: J
to
= 200 · 10
-4
kgm
2
; K
P
= 20 Nms/rad, T
N
=10ms; K
P
/J
to
=1000
The smallest factor K
P
/J
to
now determines the further adaptation of the speed control gain.
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
rive 1: K
P
new
=J
to
·
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
=50 · 10
-4
kgm
2
· 1000=5 Nms/rad
a
a
a
a
a
a
a
a
a
a
a
a
K
P
J
to
a
a
a
a
min
Drive 2: K
P
new
=10 Nms/rad
Drive 3: K
P
new
=20 Nms/rad
12–306
© Siemens AG 1992 All Rights Reserved 6FC5197- AA50
SINUMERIK 840C (IA)