06.93 12 Functional Descriptions
12.6.8 Examples of coordinate transformation
12.6.8.2 Example of 2D coordinate transformation
A transformation data set for 2D coordinate transformation must be defined as follows:
NC MD 5060 Channel number of the transformation
Example: 0000 0010 (binary form) (channel 2)
NC MD 5061 G Function for transformation selection G133 0001 0011
G233 0010 0011
G333 0011 0011
NC MD 5062 Axis name 1st fictitious axis (A
1F
) -X1
NC MD 5063 Axis name 2nd fictitious axis (A
2F
) -Y1
NC MD 5064 Axis name of the infeed axis (real axis) Example: 0000 0010 (Z)
X1
(A
1F
)
Y1
(A
2F
)
NC MD 5065 Axis name of the 1st real axis (A
1R
) - linear axis Example: 0000 0000 (X)
NC MD 5066 Axis name of the 2nd real axis (A
2R
) - rotary axis Example: 0000 0101 (C)
a
a
Y
1
a
a
a
Y
X
a
a
a
a
a
a
X
1
X
Y
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
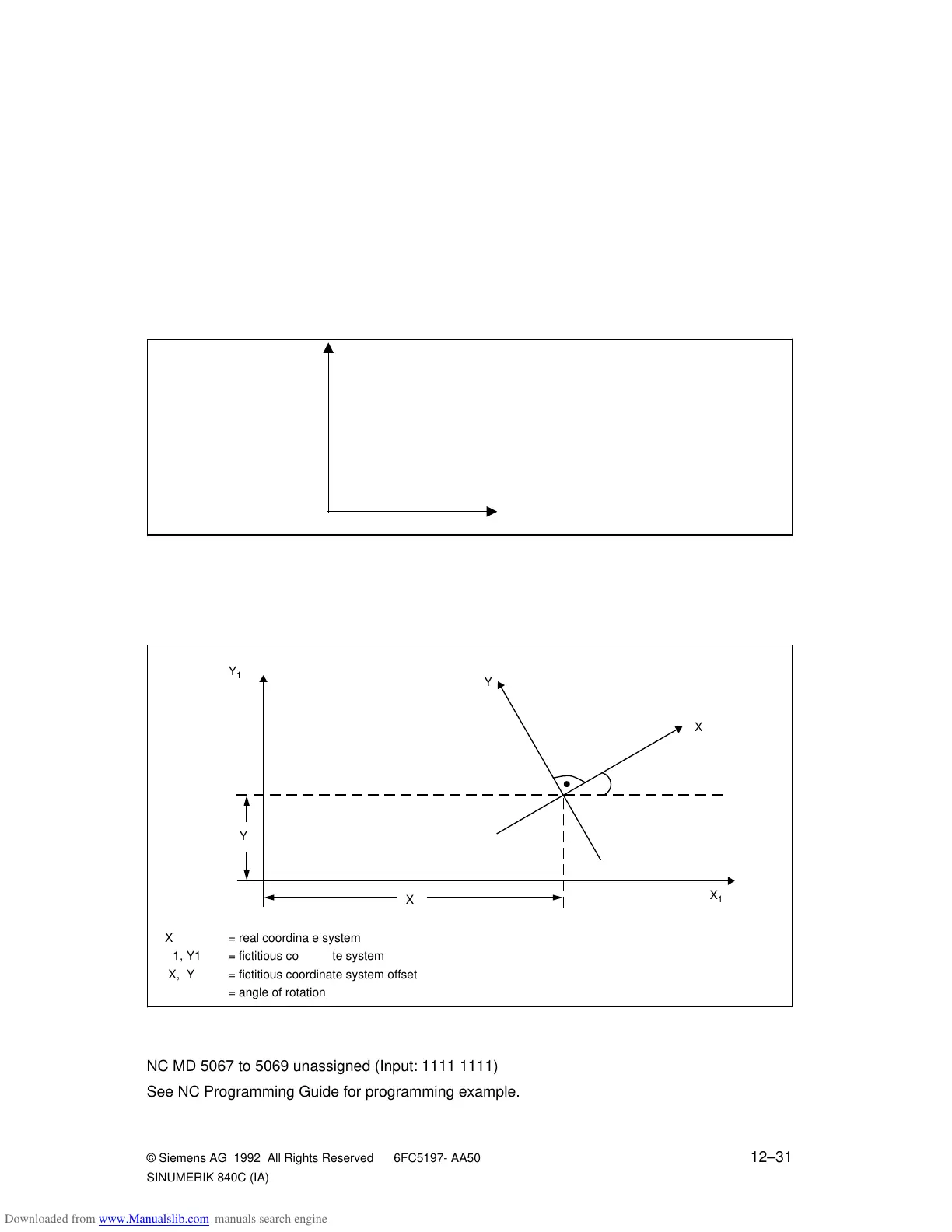
X, Y = real coordinate system
X1, Y1 = fictitious coordinate system
X, Y = fictitious coordinate system offset
= angle of rotation
NC MD 5067 to 5069 unassigned (Input: 1111 1111)
See NC Programming Guide for programming example.
© Siemens AG 1992 All Rights Reserved 6FC5197- AA50 12–31
SINUMERIK 840C (IA)