09.95 10 Axis and Spindle Installation
10.5.4 Curved acceleration characteristic (SW 4 and higher)
Figure 2 shows the speed characteristics which are obtained when the acceleration capability
is fully utilized.
In speed-controlled operation, the drive accelerates either according to the acceleration rate
(dashed line for T2 in Fig. 2) set in MD 419* (ramp-up time constant T in open-loop control
mode) or, when the ramp-up time constant is shorter, optimally in terms of time along the
current limit.
With software versions up to and including SW 3, the ramp-up time constant in MD 478* for
position-controlled operation must be set such that the current limit must not be reached
when the drive accelerates to maximum speed to avoid the risk of instability or overshoot on
positioning. The maximum acceleration capability of the drive cannot be fully utilized.
In the new software version, a speed-dependent acceleration characteristic, which can be
adapted according to the prevalent physical conditions (speed-dependent adaptation), is
implemented for the position-controlled spindle operating modes (most important application:
Open-loop controlled operation of a leading spindle in the synchronous spindle or ELG
grouping).
In main spindle drives, the torque is limited as follows (cf. Fig. 1):
• Constant torque up to rated speed n
n
: Torque = const
• Constant power above rated speed
up to breakdown speed n
k
: Torque 1 / n
• Power reduction at higher speeds up to n
max
: Torque 1 / (n*n)
Allowance is made for these characteristics in the control in the form of an acceleration
adaptation which is simple to parameterize:
• Constant acceleration (according to MD 478* as with previous SW) up to a freely settable
speed limit n
x
.
The speed limit nx is entered via a new MD 2471* - MD 2478* which parameter-set-
specific.
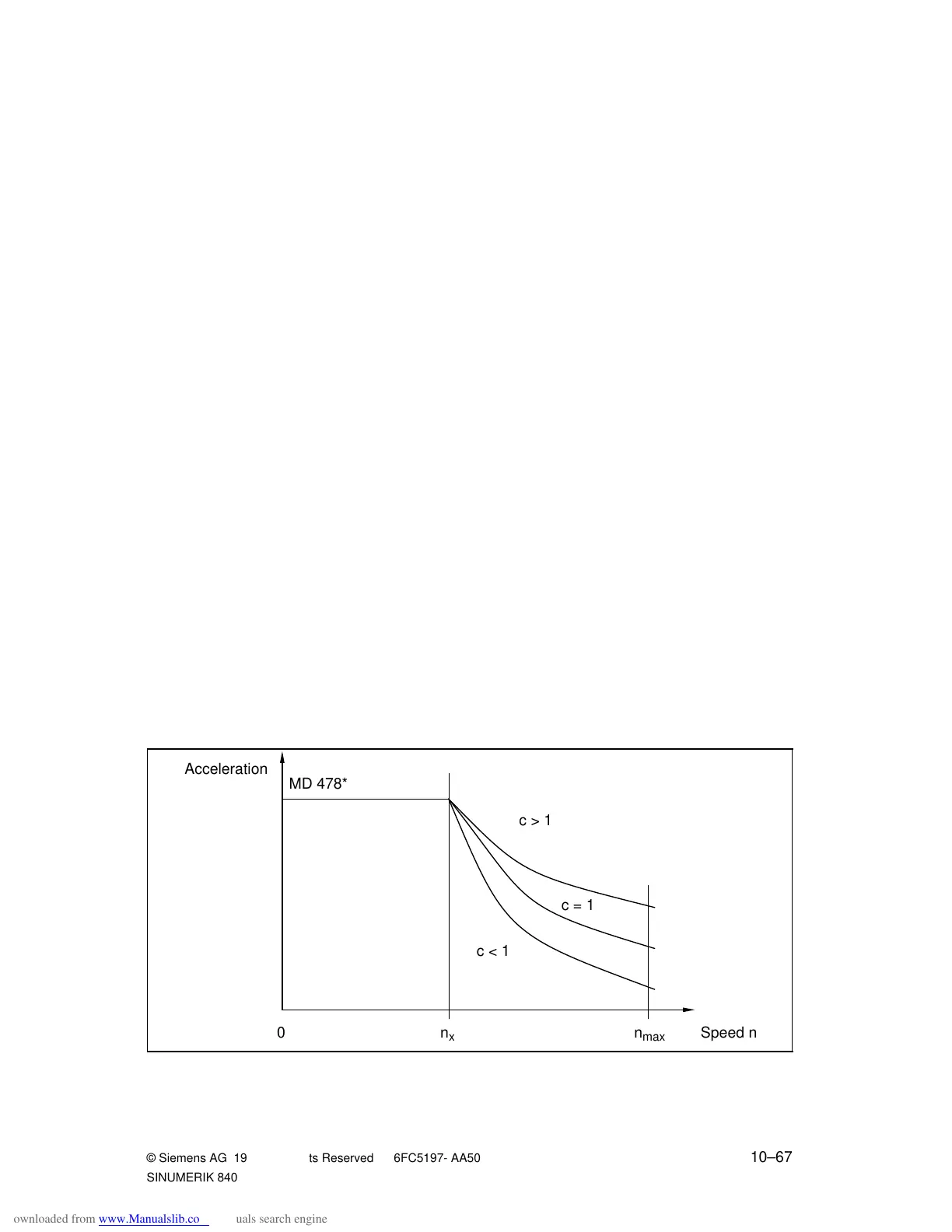
• Above speed limit nx, the acceleration rate is reduced according to the equation:
Acceleration= MD 478* n
x
/ n
n: Present speed
It may to be necessary to make allowance for the acceleration characteristic of the induction
drive which drops in proportion to 1/(n*n) above the speed range of constant power. This can
be achieved approximately by means of an additionally applied adaptation factor c (MD 2479* -
MD 2486*):
Acceleration= (MD 478*) for n n
x
Acceleration= (MD 478*) * [n
x
/ (n * c)+(c - 1) / c] for n>n
x
Fig. 3 Possible shapes of acceleration characteristic when adaptation factor is varied. For c = 1 (1 = 100 %),
the acceleration above speed limit nx is reduced in inverse proportion to the speed.
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
© Siemens AG 1992 All Rights Reserved 6FC5197- AA50 10–67
SINUMERIK 840C (IA)