Watlow F4T • 122 • Chapter 5 Function Reference
Use Remote Set Point Active Level
Choose the signal value at the REN receiver which causes the loop to use the remote set point
value received at RSP instead of the Set Point or Manual Power setting. See Remote Set Point
Type above.
Options:
• High: the remote set point is used when the signal is on
• Low: the remote set point is used when the signal is off
Set Point
Set the desired process value. When Control Mode is auto, the loop adjusts its outputs to
make the process value (input IN) equal to this setting.
Range: Minimum Set Point to Maximum Set Point
Manual Power
Set the desired output value for HT, CL and PWR outputs when Control Mode is Manual.
Range: Minimum Manual Power to Maximum Manual Power
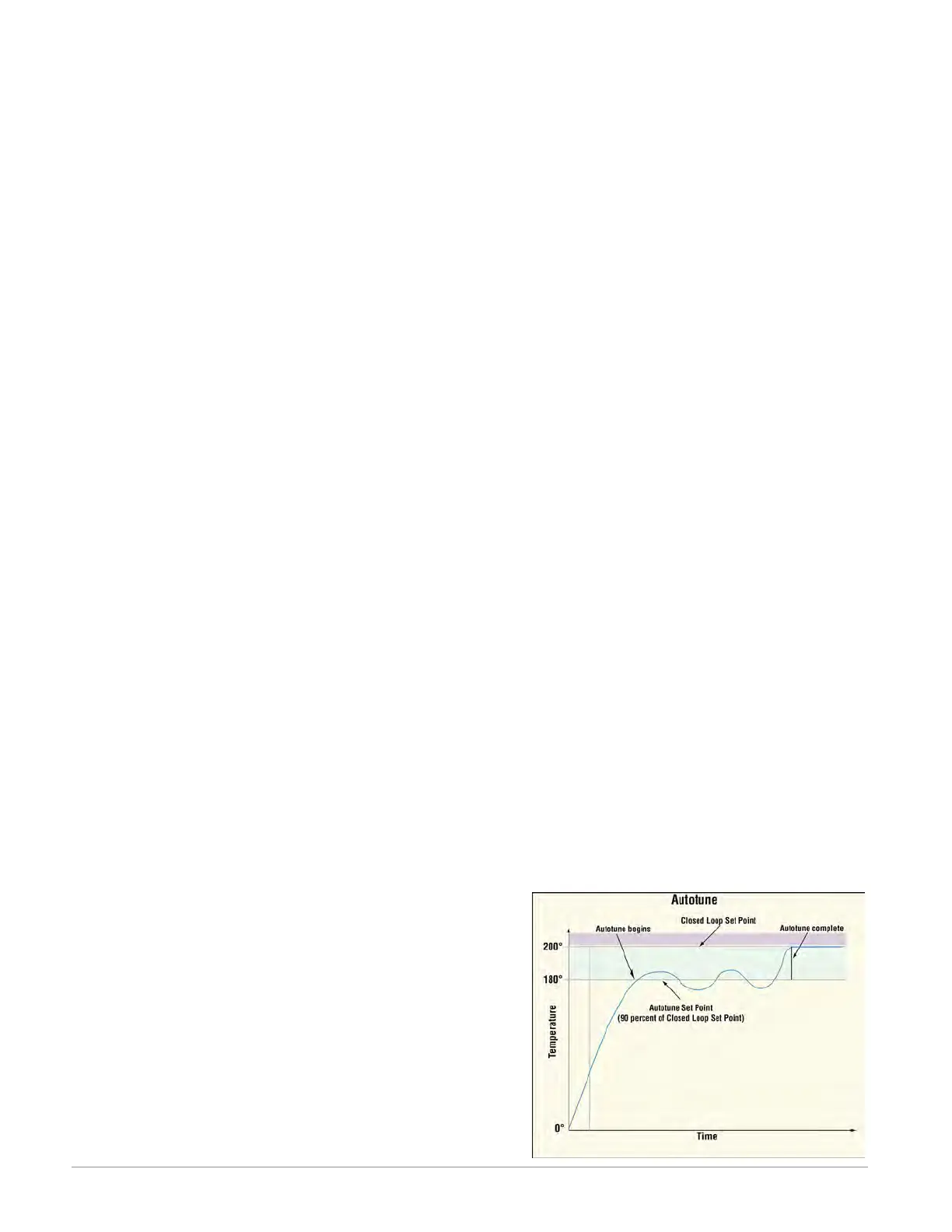
Autotune Set Point
Set the percentage of the Set Point at which the loop autotunes. Because autotuning drives
the process value above and below the set point, in some applications it may be necessary or
preferable to autotune at a set point below or above the normal set point.
This parameter applies when either Heat Algorithm or Cool Algorithm or both are set to PID
and autotuning is performed.
Range: 50.0 to 200.0%
Autotune Aggressiveness
Choose the desired responsiveness for PID control after autotuning. This parameter applies
when either Heat Algorithm or Cool Algorithm or both are set to PID and autotuning is per-
formed.
Options:
• Critical: balance a rapid response with minimal overshoot
• Over: bring the process value to the set point with minimal overshoot
• Under: bring the process value to the set point quickly tolerating overshoot
Autotune
When autotuning, the controller automatically selects
the PID parameters for optimal control, based on the
thermal response of the system. Five sets of PID val-
ues are available. Default PID values exist for all PID
sets, although these values typically do not provide
optimal control. PID values can be autotuned or ad-
justed manually.
When an autotune is started the current Set Point is
used to calculate the tuning set point. The controller
will disregard all set point changes until the tuning
process is complete. For example, if the active set