Watlow F4T • 198 • Chapter 5 Function Reference
Retentive: measures how long the input is active and triggers the output when the cumulative
time reaches a specified duration
Off
When the Timer block’s function is set to Off, the transmitter is in its inactive state. See
Transmitter Active Level.
Signals
Direction Label Type Function
Transmitter - - - - Digital
In the state selected with the Transmitter Active Level pa-
rameter
Function
To disable the timer and hold the output is in its inactive state, set Function to Off.
Transmitter Active Level
Choose the output’s active state. When Function is set to Off, the output is in the inactive
state, the opposite of the state selected here.
Options:
• High: the timer’s output is off while the timer is disabled.
• Low: the timer’s output is on while the timer is disabled.
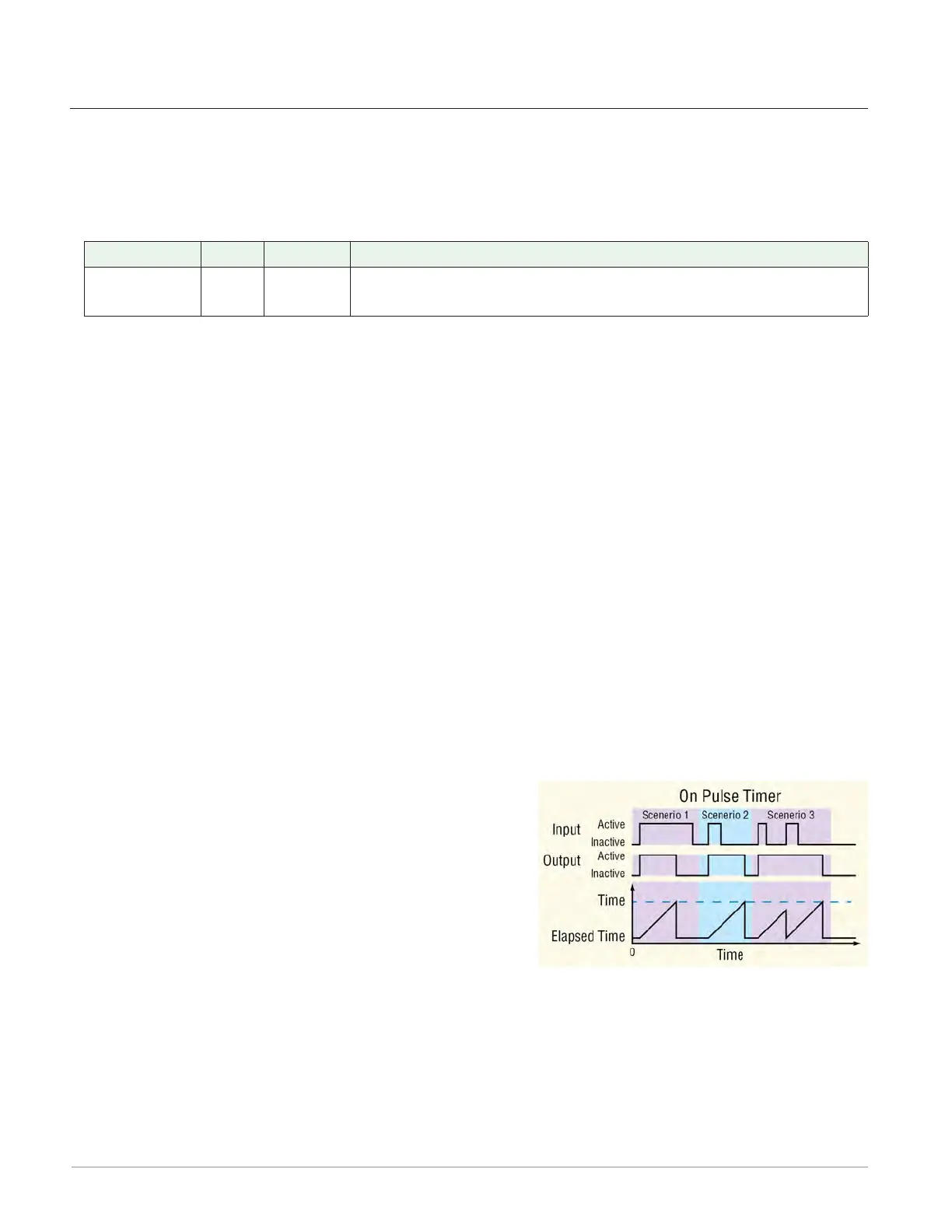
On Pulse
This function produces an output pulse of a constant duration. This can be used as a mini-
mum on time for devices that do not tolerate excessive cycling.
To understand the timer’s behavior, consider these scenarios illustrated in the timing diagram
below:
1. When input changes to its active state, the function sets the output to its active state and
begins accumulating the elapsed time. Once the elapsed time reaches the value set for
the Time parameter, the output returns to its in-
active state and the elapsed time resets to zero.
2. The input need not stay active for the output to
remain active for the specified time.
3. However, while the timer is running, if the input
becomes inactive and then active again, the pulse
length is increased.
Note:
The active and inactive states are user configurable with the parameters described below.
Therefore, the description of the timer’s behavior for its inputs and outputs refers to the
active and inactive states for each rather than on or off. For example, if the input’s ac-
tive state is set to High, the timer starts running (becomes active) when the input changes
from low (off) to high (on). However, if the input’s active state is set to Low, the timer
starts running (becomes active) when the input changes from high (on) to low (off).