6.13 Absolute Linear Encoders
6.13.6 Calculating the Current Position in Machine Coordinates
6-89
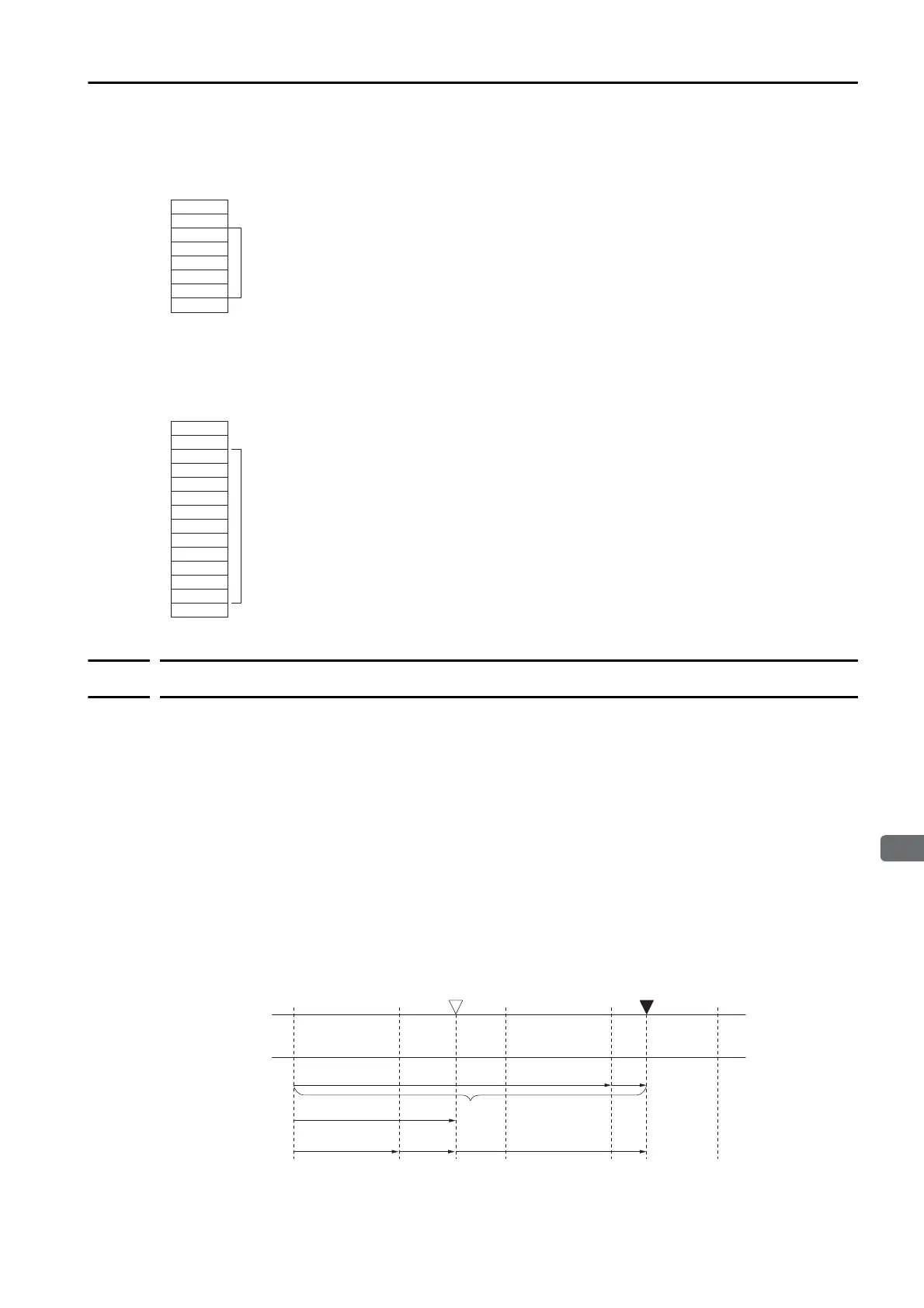
Data Format of PAO Signal
As shown below, the message format consists of eight characters: “P,” the sign, the 5-digit upper 15-
bit position data, and “CR” (which indicates the end of the message).
Data Format of PSO Signal
The data format for a Linear Servomotor consists of 17 characters: “P,” the sign, the 11-digit
36-bit data, and “CR” (which indicates the end of the message).
6.13.6
Calculating the Current Position in Machine Coordinates
With an absolute linear encoder, you must set the position of the origin (i.e., the origin of the
machine coordinate system).
The host controller reads the coordinate from the origin of the encoder coordinate system. The
host controller must record the value of this coordinate.
The method to calculate the coordinate value of the present position from the origin of the
machine coordinate system is given below.
The position data from the absolute linear encoder is signed 36-bit data, but the upper 16 bits
(with sign) and the lower 20 bits are output separately.
For the upper 16-bit data (with sign), the upper bits (16 bits, including the sign) of the current
position after dividing by the setting of Pn281 are output with serial communications according
to the transmission specifications.
For the lower 20-bit data , the lower bits (20 bits) of the current position after dividing by the
setting of Pn281 are output as a pulse train.
P
+ or −
0 to 9
0 to 9
0 to 9
0 to 9
0 to 9
CR
Upper 15 bits
of position data
P
+ or −
0 to 9
0 to 9
0 to 9
0 to 9
0 to 9
0 to 9
0 to 9
0 to 9
0 to 9
0 to 9
0 to 9
CR
Position data:
36 bits (11 digits)
Machine coordinate
Value of upper
16-bit data
(with sign)
0123 4
0
1
2 3
Origin (reference position) Current position
M
O × R
P
E
PO
PS
PMPS’MS × R

 Loading...
Loading...


