8.12 Manual Tuning
8.12.2 Compatible Adjustment Functions
8-79
Note: 1. Overshooting will occur if you set the torque feedforward too high. Set the optimum value while monitoring
the response.
2. You cannot use the torque feedforward function together with torque limiting with an analog voltage refer-
ence.
Speed Feedforward
You set the speed feedforward function with the position control option (Pn207 = n.X)
and the speed reference input gain (Pn300).
The default setting of Pn300 is 600. Therefore, if the speed feedforward value is ±6 V, then it
will indicate the rated speed.
Note: Overshooting will occur if you set the feedforward too high. Set the optimum value while monitoring the
response.
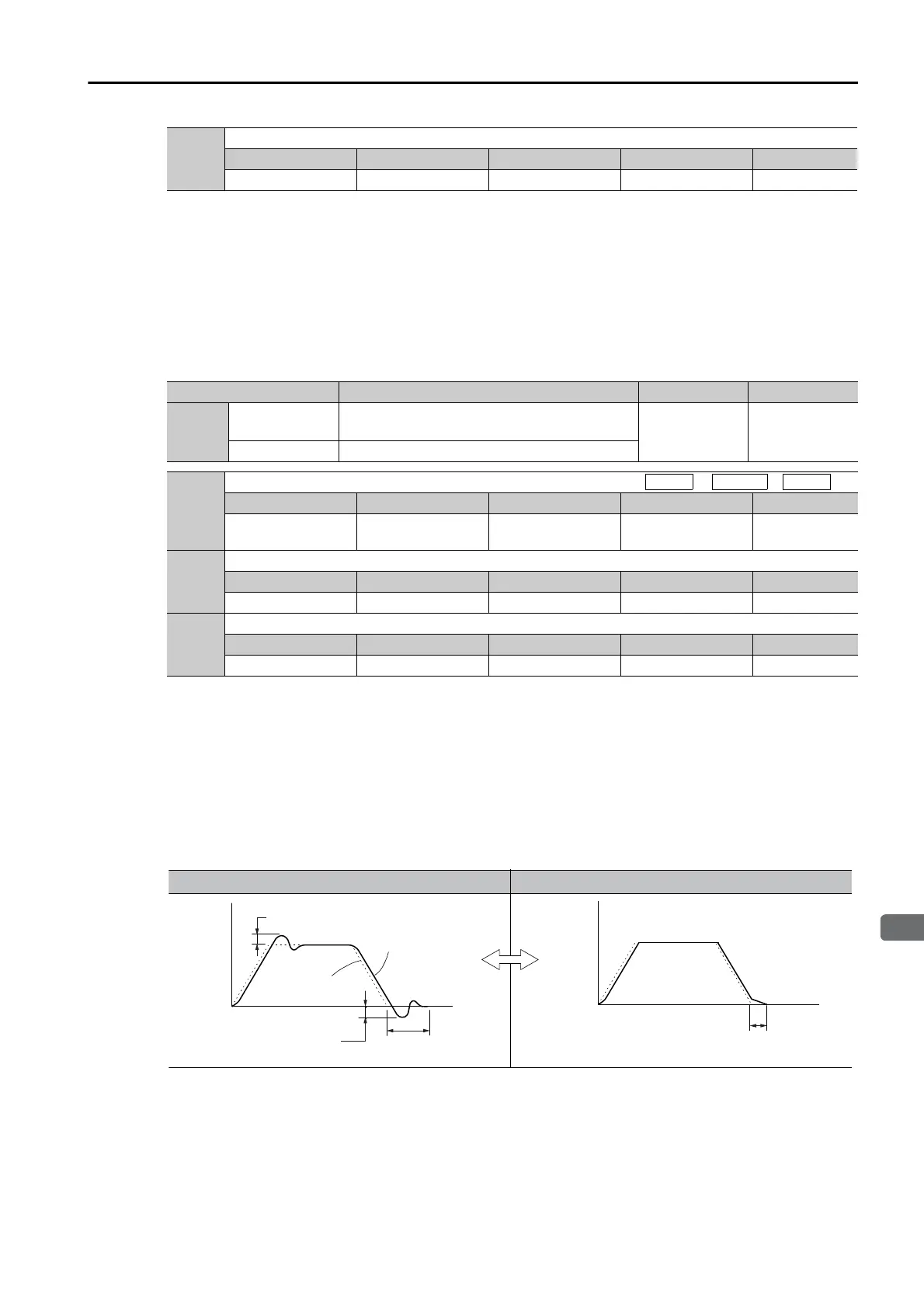
Mode Switching (Changing between Proportional and PI
Control)
You can use mode switching to automatically change between proportional control and PI con-
trol.
Overshooting caused by acceleration and deceleration can be suppressed and the settling time
can be reduced by setting the switching condition and switching levels.
Pn426
Torque feedforward average movement time
Setting Range Setting Unit Default Setting When Enabled Classification
0 to 5,100 0.1 ms 0 Immediately Setup
Parameter Meaning When Enabled Classification
Pn207
n.0
(default setting)
Do not use V-REF.
After restart Setup
n.1 Use V-REF as a speed feedback input.
Pn300
Speed Reference Input Gain
Setting Range Setting Unit Default Setting When Enabled Classification
150 to 3,000
0.01 V/Rated
motor speed
600 Immediately Setup
Pn307
Speed Reference Filter Time Constant
Setting Range Setting Unit Default Setting When Enabled Classification
0 to 65,535 0.01 ms 40 Immediately Setup
Pn30C
Speed Feedforward Average Movement Time
Setting Range Setting Unit Default Setting When Enabled Classification
0 to 5,100 0.1 ms 0 Immediately Setup
Without Mode Switching With Mode Switching
Motor
speed
Overshooting
Actual Servomotor
operation
Reference
Time
Settling time
Overshooting
Motor
speed
Settling time
Time

 Loading...
Loading...


