4 PROGRAMMING
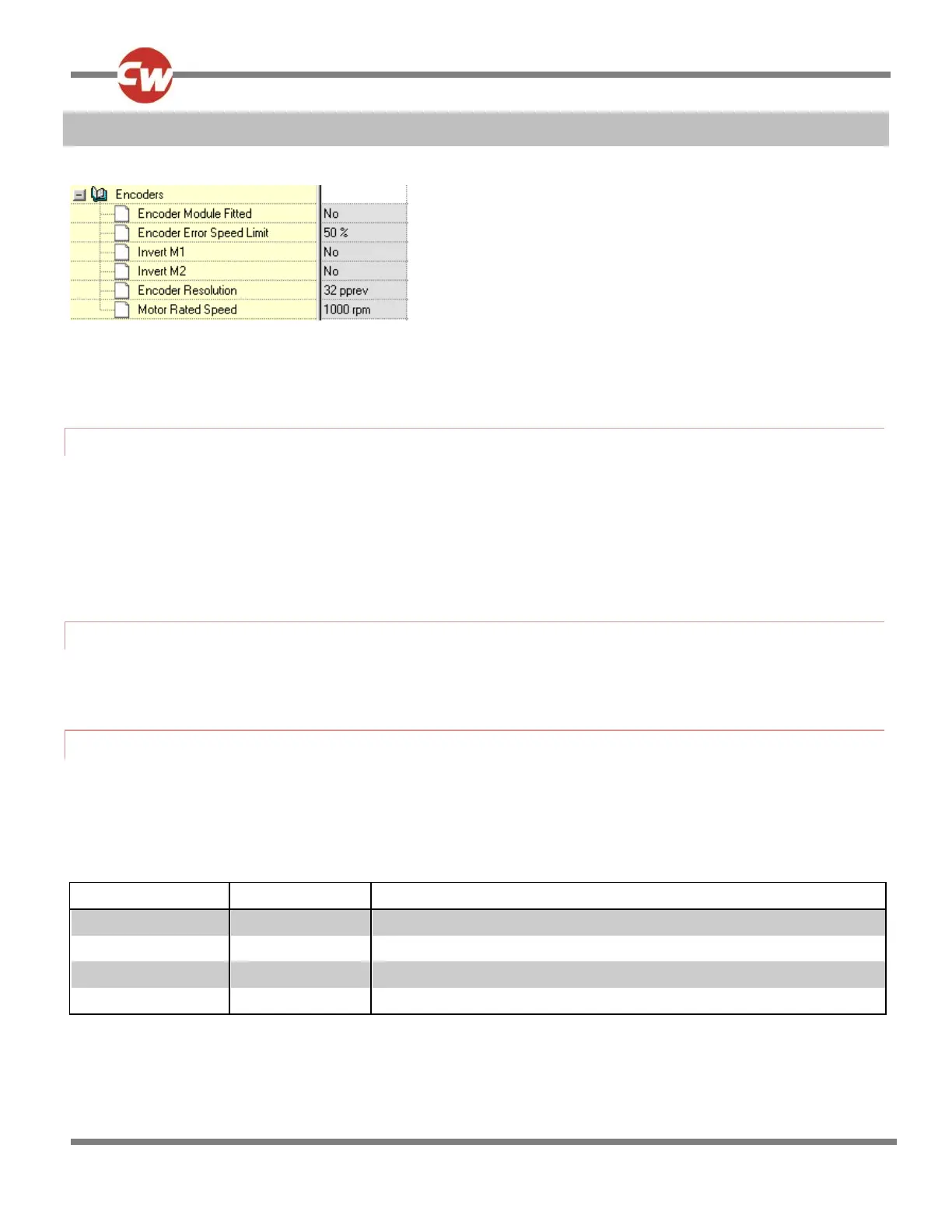
Within the Encoders branch of the PC Programmer, there are the following parameters.
Additionally, to ensure system safety should an encoder become defective or disconnected, it is also necessary to set the
standard R-net parameter, Compensation.
Each of the parameters are described below.
4.1 ENCODER MODULE FITTED
This sets whether the Power Module checks for the presence of an Encoder Module, which in turn checks for correctly
functioning encoders.
The programmable options are Yes and No.
If set to Yes and functioning encoders are not connected, then an error condition will occur.
If set to No and functioning encoder are not connected, then conventional drive control will occur.
4.2 ENCODER ERROR SPEED LIMIT
This sets the maximum speed of the wheelchair should an encoder error be detected.
The programmable range is 0% to 100% in steps of 1%.
4.3 INVERT M1
This reverses the way the speed and direction signals are read from the encoder fitted to the motor that is connected to the
Power Module’s M1 connector.
The programmable options are Yes and No. The table below shows the effect of each option.