*Not normally required with a Gyro Module installation and should be disabled during Gyro Module set up
See the programming chapter for details on these parameters.
3.01 PARAMETER LIST
The Gyro Module parameters are held within their own programming group.
Gyro Module Fitted Sets whether the Gyro algorithms are active in the Power Module and enables checking for a Gyro signal
Orientation Sets the expected mounting orientation for the module on the chair
Gyro Error Speed Limit Sets the maximum speed of the wheelchair should a Gyro error be detected
Angular Speed Scalar Calibrates the Gyro to a particular wheelchair configuration
Proportional gain Sets the rate at which the Gyro will respond to fast changes in wheelchair direction
Integral Gain Influences the straight tracking of a wheelchair to provide directional stability
Dynamic Gain Sets whether the system uses 2 or all 4 Gain parameters to affect drive stability
Low Speed Proportional Gain Sets the rate at which the Gyro will respond to fast changes in wheelchair direction at low speed
Low Speed Integral Gain Influences the straight tracking of a wheelchair to provide directional stability at low speed
Gyro Profile Select Sets the drive profiles in which closed loop Gyro control is active
3.1 GYRO MODULE FITTED
This parameter sets sets whether the Gyro algorithms are active in the Power Module and enables checking for a Gyr Signal.
The programmable options are Yes and No.
If set to Yes and the Gyro Module is not connected, then the wheelchair forward speed will be limited to the value set
by Gyro Error Speed Limit.
If set to No and the Gyro Module is not fitted then no speed limit will be present
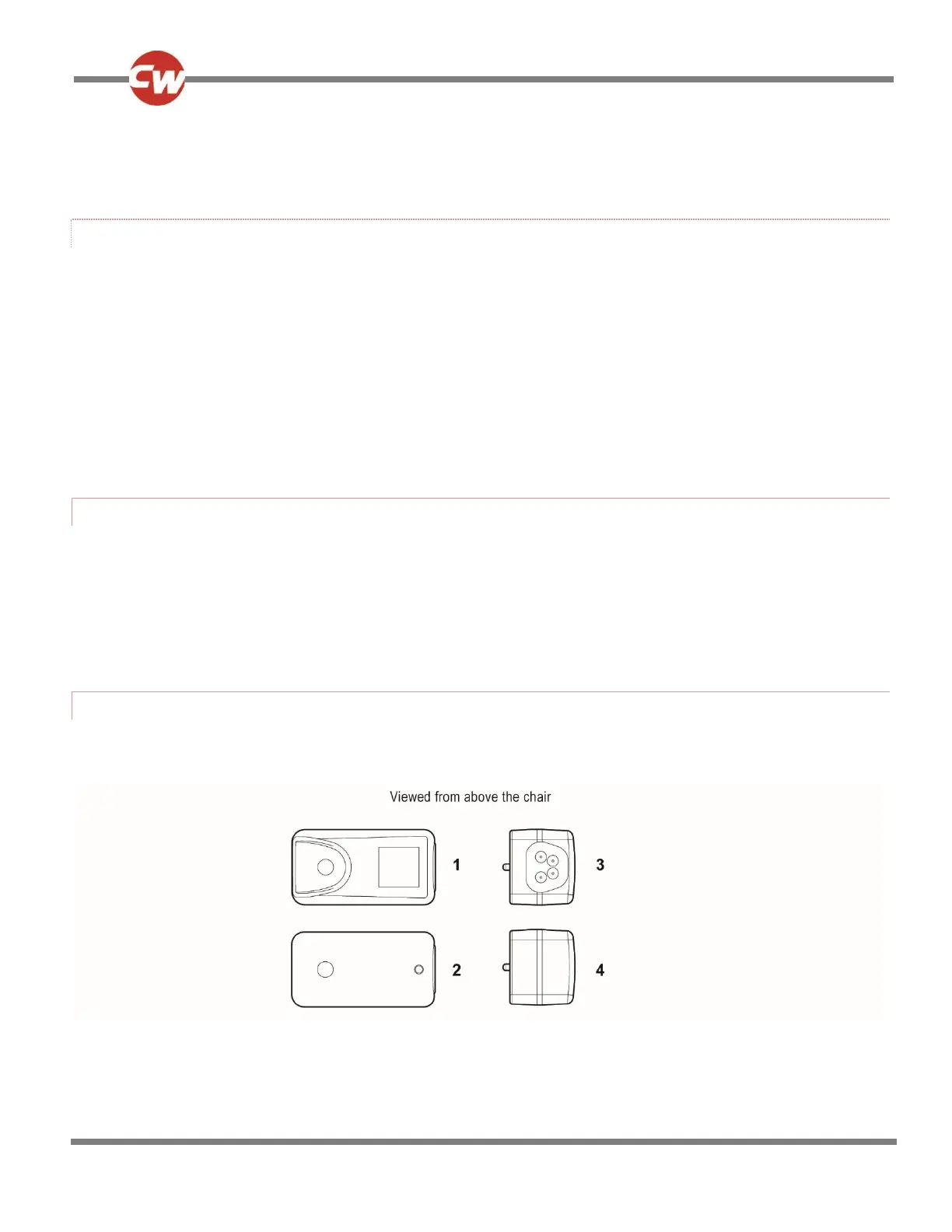
3.2 ORIENTATION
Orientation sets the expected mounting of the Gyro Module viewed from above the wheelchair. There are 4 programmable
options.