Custom Can streams - CANbus Message Input
After a Can Message Object has been created, you can start defining CANbus Input channels.
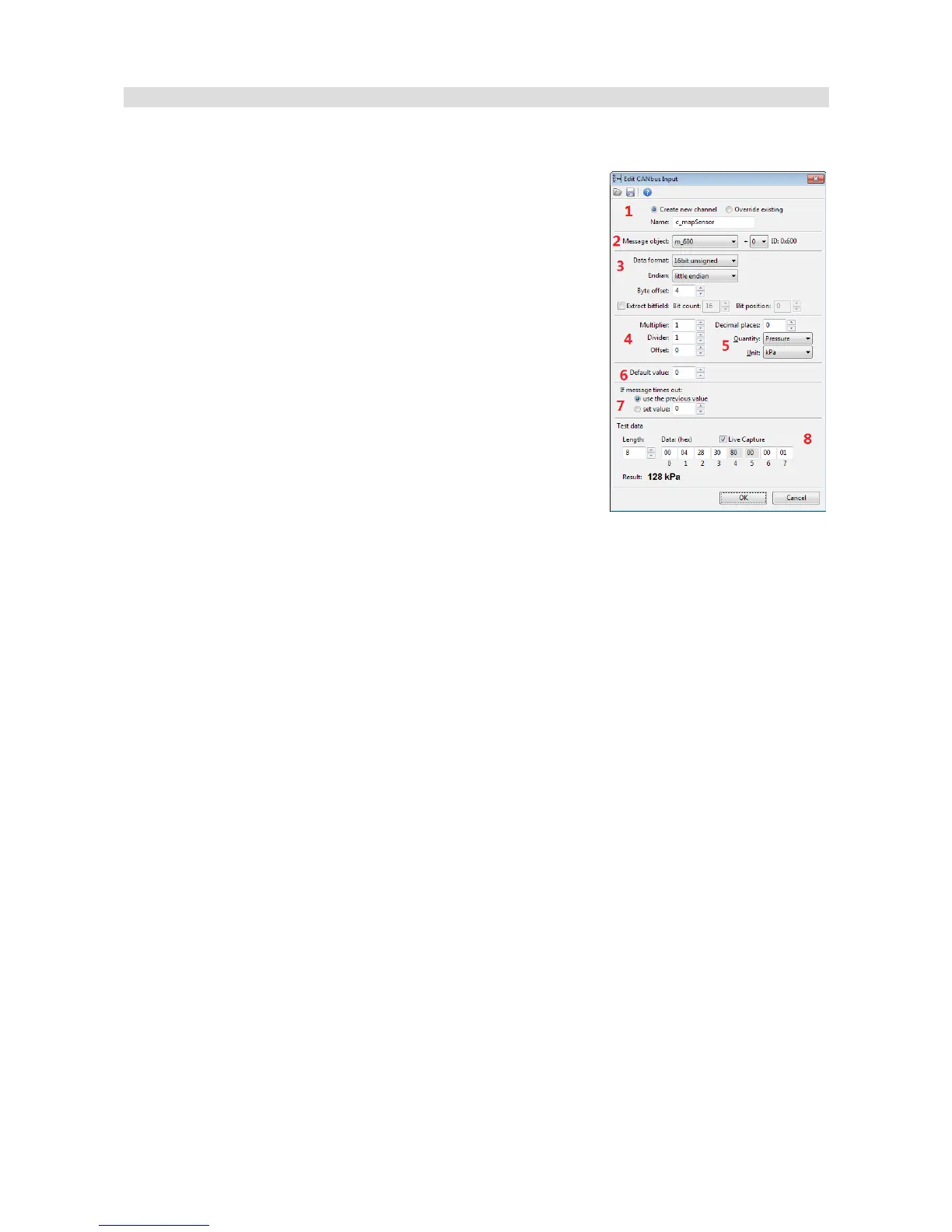
(1) For starters, decide whether you will be creating a new channel
(option: Create new channel) or whether you will be overriding an
existing channel (option: Override existing).
When creating a new channel, you should choose a unique name
so that it can be identified.
When overriding, you must choose an existing channel from the
“ecu.” group. (e.g. ecu.rpm). Additionally, you should match the
decimal places and a unit to such selected channel.
(2) Next, select the prepared mob and select offset in frames from
the list marked '+'. The scope of this parameter depends on the
selected Size in the parameters of the used Message object.
(3) The next step is setting the Byte offset parameter. It marks the location of our values in the
CAN frame (0-7).
You should select the interpretation of the number:
• signed/unsigned – signed is a number with a sign (it can receive positive and negative
values, as well as zero). An example of such value is the value from the cooling liquid
temperature sensor. Unsigned – numbers zero and above. For example engine speed
(RPM)
• 8 bit / 16 bit - number width in bits; 1 byte / 2 bytes, respectively
– signed 8 bit - scope of numbers -128..127
– signed 8 bit - scope of numbers 0..255
– signed 16 bit– scope of numbers -32768..32767
– unsigned 16 bit– scope of numbers 0..65535
• big endian / little endian - i.e. the “sequence” of bytes for 16-digit numbers. It shows how
a number stored in two consecutive bytes is to be interpreted. E.g. numbers 0x12, 0x13
can be interpreted as 0x1234 for the big endian or 0x3412 for the little endian.
Page 96/137