426
INTELLIGENT ACTUATOR
Appendix
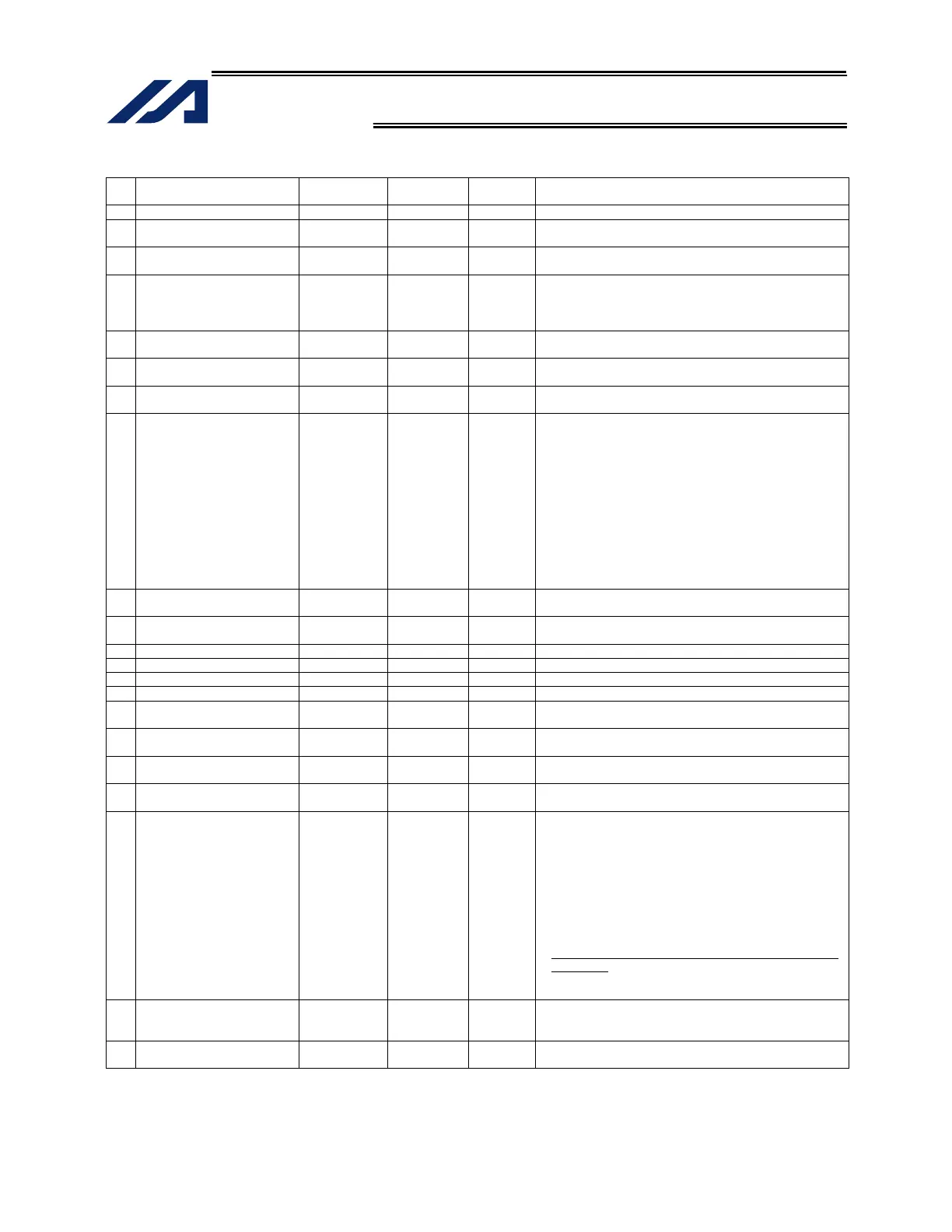
3. Axis-Specific Parameters
No Parameter name
Default value
(Reference)
Input range Unit Remarks
~
1 Axis operation type 0 0 to 1 0: Linear movement axis, 1: Rotational movement axis
(Angle control)
2 to
5
(For expansion) 0 ~
6 Coordinate/physical-
operation direction selection
1 0 to 1
0: Motor CCW Positive direction on the coordinate
system
1: Motor CCW Negative direction on the coordinate
system
7 Soft limit + 50000 -99999999 to
99999999
0.001 mm Fixed to 359.999 degrees internally in the index mode.
Invalid in the infinite-stroke mode.
8 Soft limit – 0 -99999999 to
99999999
0.001 mm Fixed to 0 degree internally in the index mode. Invalid in
the infinite-stroke mode.
9 Soft-limit actual position
margin
2000 0 to 9999 0.001 mm Actual position margin in the positioning boundary critical
zone in the infinite-stroke mode
10 Home-return method 0 0 to 5 0: Search phase Z after end search
1: Current position 0 home (This parameter can be
specified only with an incremental encoder. Pay
attention to contact.)
2: Current position = Preset home (This parameter can be
specified only with an incremental encoder. Pay
attention to contact.)
3: Automatically refresh home preset value and move to
reference coordinate after end search
* Valid only for ball-screw spline linear movement axes.
* Related information: Axis-specific parameter Nos. 10,
12, 141
(Main application version 0.82 or later)
11 Home-return end-search
direction selection
0 0 to 1 0: Negative end of the coordinate system
1: Positive end of the coordinate system
12 Home preset value 0 -99999999 to
99999999 0.001 mm
(Refer to axis-specific parameter No. 76)
13 SIO/PIO home-return order 0 0 to 16 Executed from the smallest one.
14 Home-sensor input polarity 0 0 to 2 0: Do not use, 1: Contact a, 2: Contact b
15 Overrun-sensor input polarity 0 0 to 2 0: Do not use, 1: Contact a, 2: Contact b
16 Creep-sensor input polarity 0 0 to 2 0: Do not use, 1: Contact a, 2: Contact b
17 Initial home-sensor pull-out
speed at home return
10 1 to 100 mm/sec
18 Creep speed at home return 100 1 to 500 mm/sec End search speed in the creep-sensor non-detection
section, if a creep sensor is used
19 End search speed at home
return
20 1 to 100 mm/sec
20 Phase-Z search speed at
home return
3 1 to 10 mm/sec Exercise caution, since limitations apply depending on the
read/encoder pulse count.
21 Offset travel distance at
home return
1000 -99999999 to
99999999
0.001 mm Offset travel distance from the ideal phase-Z position
(Positive value = Applied in the direction of moving away
from the end) (Refer to axis-specific parameter No. 76)
* Note when an absolute encoder is used
If a value near an integer multiple of the phase-Z
distance (including an offset travel of 0) is set in this
parameter, the servo will lock above phase Z when an
ABS reset is performed, in which case the coordinate
may deviate by the number of phase-Z pulses.
Never set a value near an integer multiple of the phase-
Z distance.
(Provide a sufficient margin relative to the amplitude of
the servo system.)
22 Allowable phase-Z position
error check value at home
return
500 0 to
99999999
0.001 mm Minimum allowable distance between the end (mechanical
or LS) and phase Z in a rotary encoder specification.
Phase-Z search limit in a linear encoder specification.
23 Phase-Z count per encoder
revolution
1 1 to 8 Only “1” can be set, in the case of an absolute encoder.
Invalid in the case of a linear encoder.

 Loading...
Loading...






