142
INTELLIGENT ACTUATOR
Part 4 Commands
2. Alphabetical Order
Operation type in the output field
CC: Command was executed successfully,
ZR: Operation result is zero, PE: Operation is complete,
CP: Command part has passed, TU: Time up
EQ: Operand 1 = Operand 2, NE: Operand 1 Operand 2,
GT: Operand 1 > Operand 2, GE: Operand 1 Operand 2,
LT: Operand 1 < Operand 2, LE: Operand 1 Operand 2
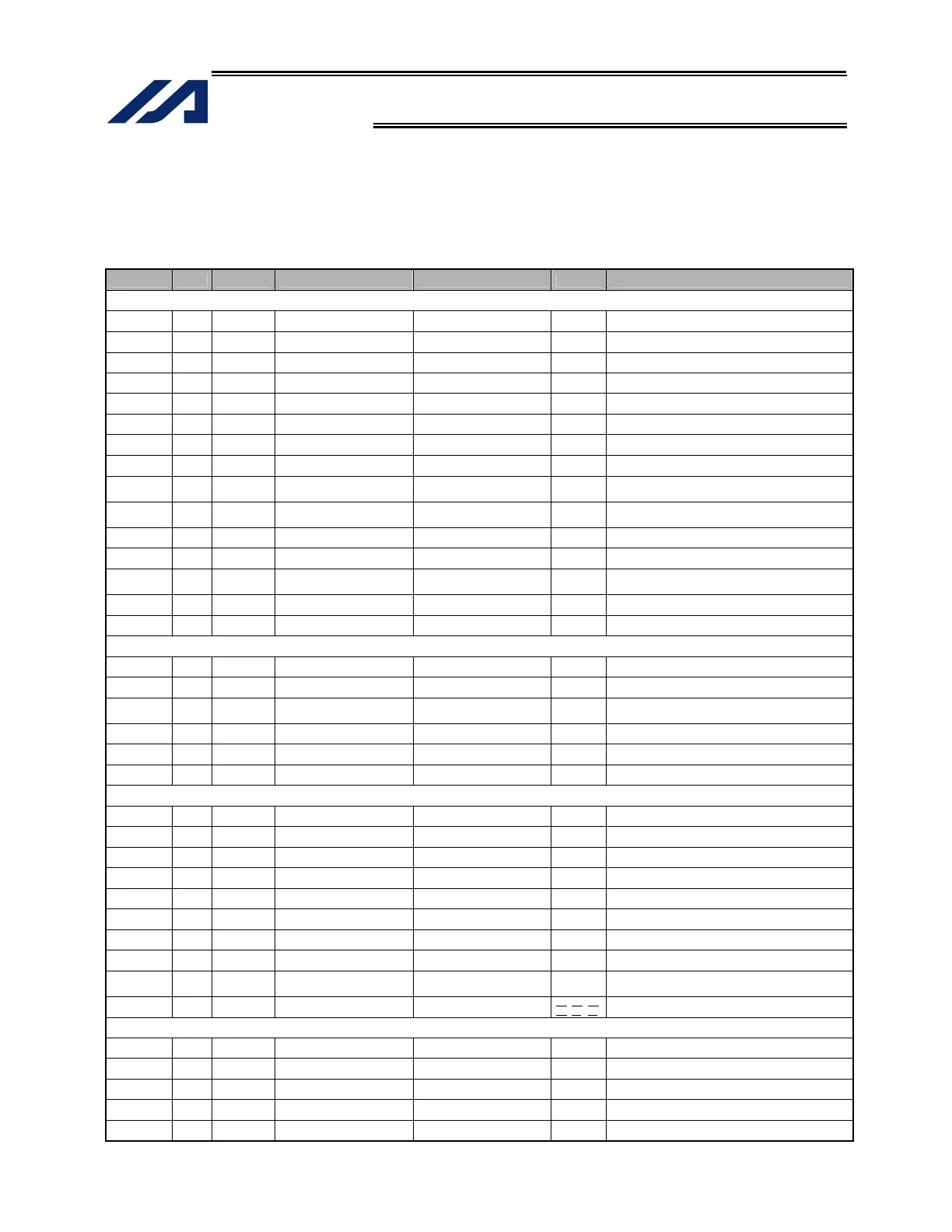
Command Page Condition Operand 1 Operand 2 Output Function
A
ABPG 179 Optional End program number (End program number) CC Abort other program
ACC 199 Optional Acceleration Prohibited CP Set acceleration
ACHZ 278 Optional Axis number Prohibited CP Declare arch-motion Z-axis
ADD 150 Optional Augend variable Addend ZR Add
AEXT 280 Optional (Position number) Prohibited CP Set arch-motion composition
AND 156 Optional AND operand variable Operand ZR Logical AND
ARC 235 Optional
Passing position number
End position number PE Move along arc
ARC2 227 Optional
Passing position number
End position number PE Move along arc 2
ARCC 232 Optional Center position number Center angle PE
Move along arc via specification of center
position and center angle
ARCD 231 Optional End position number Center angle PE
Move along arc via specification of end position
and center angle
ARCH 288 Optional Position number Position number PE Arch motion
ARCS 229 Optional
Passing position number Passing position number
PE Move three-dimensionally along arc
ATN 154 Optional
Inverse-tangent
assignment operation
Operand ZR Inverse tangent
ATRG 279 Optional Position number Position number CP Set arch trigger
AXST 245 Optional Variable number Axis number CP Get axis status
B
BASE 204 Optional Reference axis number Prohibited CP Set reference axis
BGPA 267 Optional Palletizing number Prohibited CP Declare start of palletizing setting
BGSR 175
Prohibited
Declaration subroutine
number
Prohibited CP Start subroutine
BTPF 165 Optional Output port, flag Timer setting CP Output OFF pulse
BTPN 164 Optional Output port, flag Timer setting CP Output ON pulse
BT 163 Optional Start output, flag (End output, flag) CP Output, flag [ON, OF, NT]
C
CANC 207 Optional (Input port to abort) (CANC type) CP Declare port to abort
CHPR 290 Optional 0 or 1 Prohibited CP Change task level
CHVL 230 Optional Axis pattern Speed CP Change speed
CIR 234 Optional
Passing position 1 number Passing position 2 number
PE Move along circle
CIR2 226 Optional
Passing position 1 number Passing position 2 number
PE Move along circle 2
CIRS 228 Optional
Passing position 1 number Passing position 2 number
PE Move three-dimensionally along circle
CLOS 252 Optional Channel number Prohibited CP Close channel
CLR 149 Optional Start-of-clear variable End-of-clear variable ZR Clear variable
COS 153 Optional
Cosine assignment
variable
Operand ZR Cosine
CP 159 Optional Comparison variable Comparison value
EQ NE GT
GE LT LE
Compare
D
DCL 200 Optional Deceleration Prohibited CP Set deceleration
DEG 203 Optional Division angle Prohibited CP Set division angle
DIS 209 Optional Distance Prohibited CP Set spline division distance
DIV 151 Optional Dividend variable Divisor ZR Divide
DW 239 Optional Comparison variable Comparison value CP Loop [EQ, NE, GT, GE, LT, LE]

 Loading...
Loading...






