Appendix
INTELLIGENT ACTUATOR
450
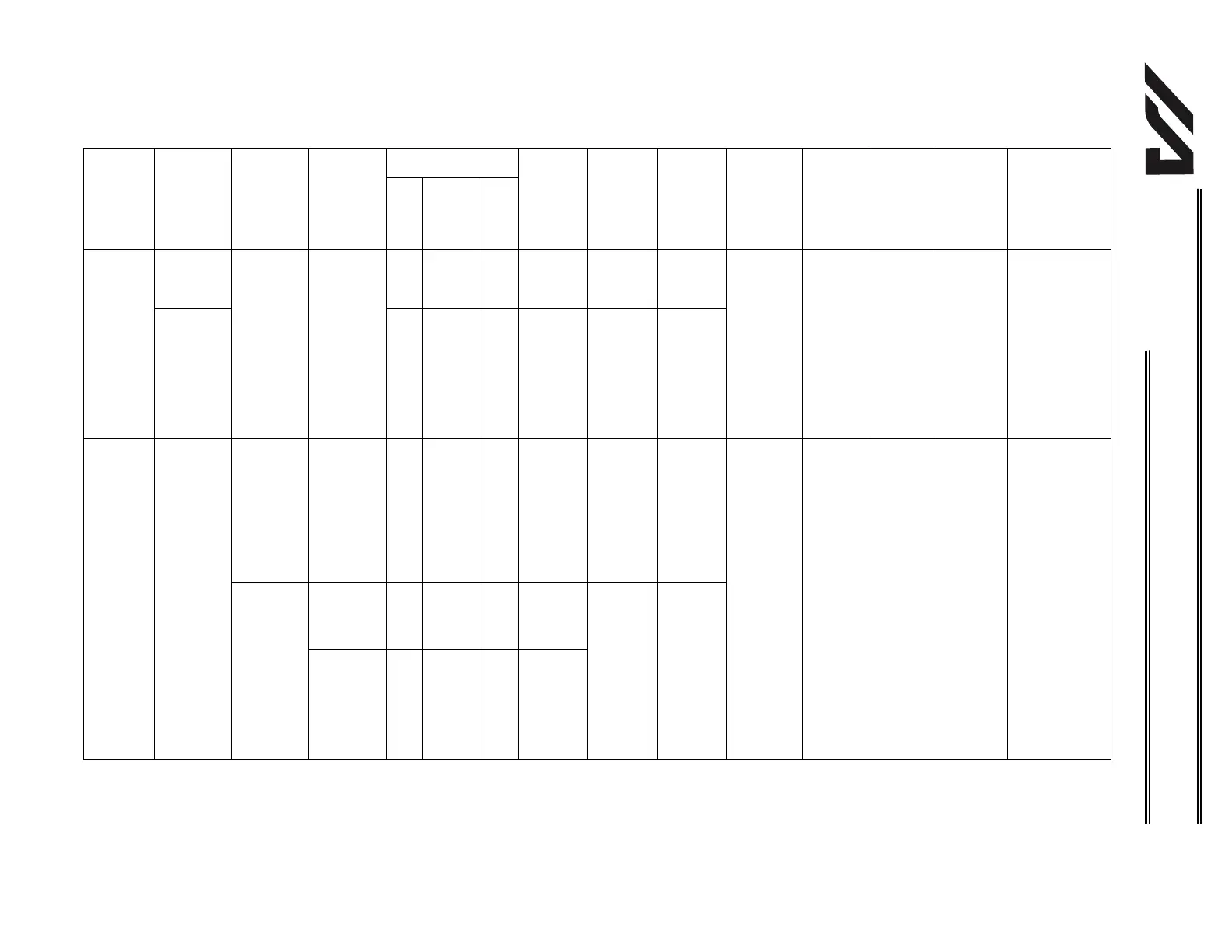
Combination Table of X-SEL Linear/Rotary Control Parameters
Permitted encoder
processing method
Axis-specific
parameter
No. 1, Axis
operation
type
Axis-specific
parameter
No. 68, Mode
selection for
linear
movement
axis
Axis-specific
parameter
No. 66, Mode
selection for
rotational
movement
axis
Axis-specific
parameter
No. 67, Short-
cut control
selection for
rotational
movement
axis
ABS
Simulated
INC
INC
Expression
of current
position
(approx.)
Axis-specific
parameter
No. 7, Soft
limit +
Axis-specific
parameter
No. 8, Soft
limit -
Axis-specific
parameter
No. 44,
Length
measurement
correction
Axis-
specific
parameter
No. 47,
Screw lead
Axis-
specific
parameter
No. 50,
Gear ratio
numerator
Axis-specific
parameter
No. 51, Gear
ratio
denominator
Input unit
0
(Normal
mode)
Counter
range
Valid Valid
0
(Linear
movement
axis)
1
(Infinite-
stroke
mode)
* Duty cycle
timeout
check must
be
reviewed.
Invalid Invalid
x
-10000 to
9999.999
(rotary)
Invalid
(Note)
Invalid
(Note)
Valid Valid Valid Valid
Distance mm
Speed mm/sec
Acceleration/
deceleration G
0
(Normal
mode)
0
(Short-cut
control not
selected)
* “0” must
be specified
if the
normal
mode is
selected.
Counter
range
Valid Valid
0
(Short-cut
control not
selected)
Counter
range
1
(Rotational
movement
axis)
Invalid
1
(Index
mode)
1
(Short-cut
control
selected)
x
0 to
359.999
(rotary)
Invalid
(fixed to
359.999
internally)
Invalid
(fixed to 0
internally)
Invalid Invalid Valid Valid
Angle mm
deg
Angular speed
mm/sec
deg/sec
Angular
acceleration/d
eceleration G
= 9807
mm/sec2
9807
deg/sec2
= 9807 x 2
/360 rad/sec2
* A “deg” value
indicates the
angle of the
rotating body
at the end.
(Note): Any positioning command other than “JXWX” exceeding a coordinate range from approx. –9990 to 9990 will generate an “Error No. CBC, Target-locus data
boundary over error.”
Executing any positioning command other than “JXWX” outside a coordinate range from approx. –9990 to 9990 will generate an “Error No. CC5,
Positioning boundary pull-out error.”

 Loading...
Loading...






