386
INTELLIGENT ACTUATOR
Appendix
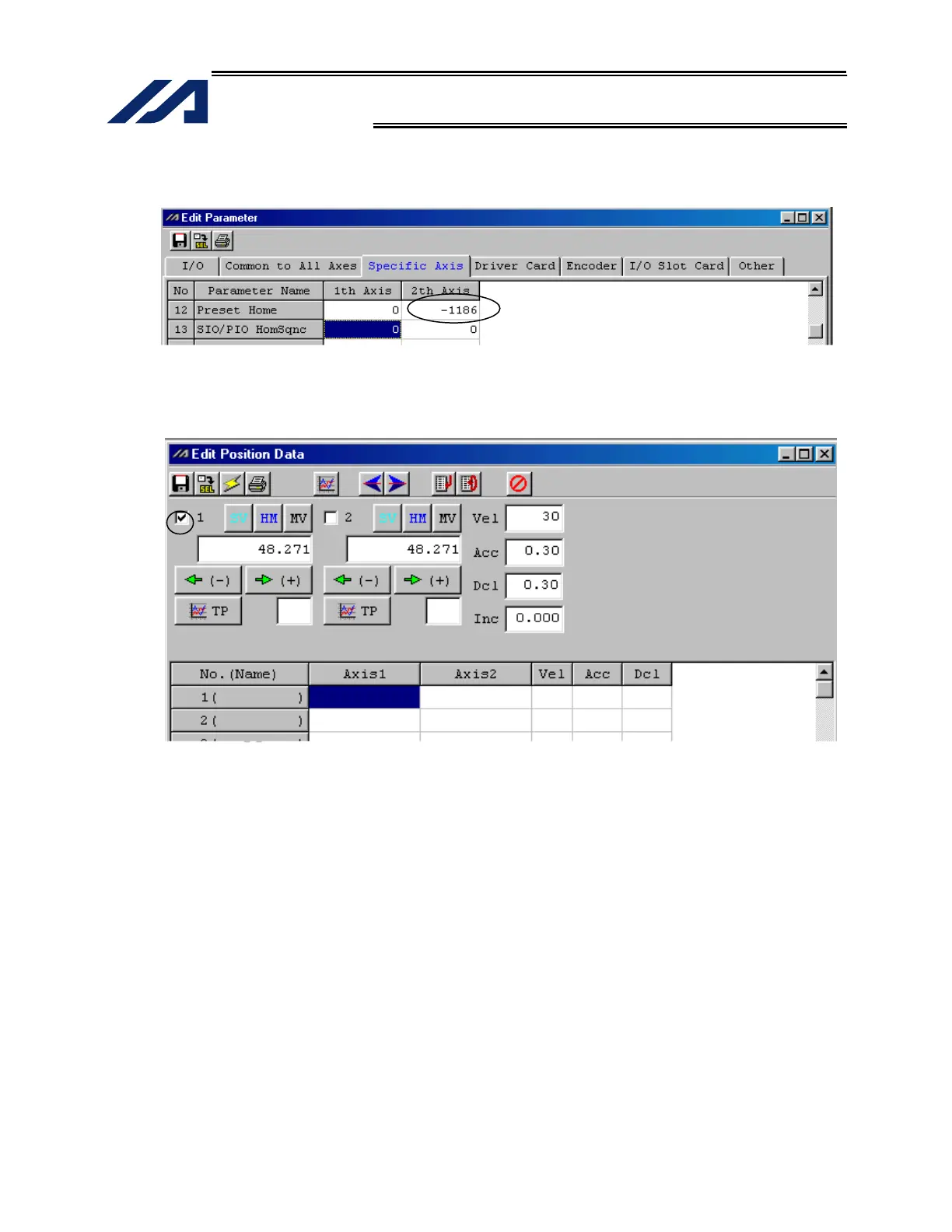
3. Enter the calculation result obtained in step 2 above in the slave-axis field of “Axis-specific
parameter No. 12, Home preset value.”
Select [Transfer to Controller] [Write to Flash ROM] [Restart Controller] (software reset).
(6) Turn on the servo and check the operation in the jog mode (operate the master axis).
If an “Error No. D0A, Driver overload error,” “Error No. C6B, Deviation overflow error,” “Error No.
CA5, Stop-deviation overflow error” or other error generates, check the following items:
If the current position of the master axis deviates significantly from that of the slave axis, the
setting in (5) may be incorrect.
Check the following parameters to confirm that the required fields are properly filled or
changed:
“Axis-specific parameter No. 65, Mating synchro-axis number”
“Axis-specific parameter No. 83, ABS synchro slave-axis coordinate initialization cancellation”
Check to see if the slider movements are restricted.
4. Standard Absolute-Reset Procedure
When the master axis = 1 and slave axis = 0 in “Axis-specific parameter No. 38, Encoder ABS/INC type”
After completing 2, “Position Adjustment of Synchro-Axis Sliders,” perform an absolute reset for the
master axis only. For the operation procedure, refer to the operation manual for the X-SEL Controller or
PC software.
Note) A synchro axis that has been reset by the standard procedure is unable to correct any positional
shift that may have occurred while the power was turned off, after the servo is turned on.

 Loading...
Loading...






