428
INTELLIGENT ACTUATOR
Appendix
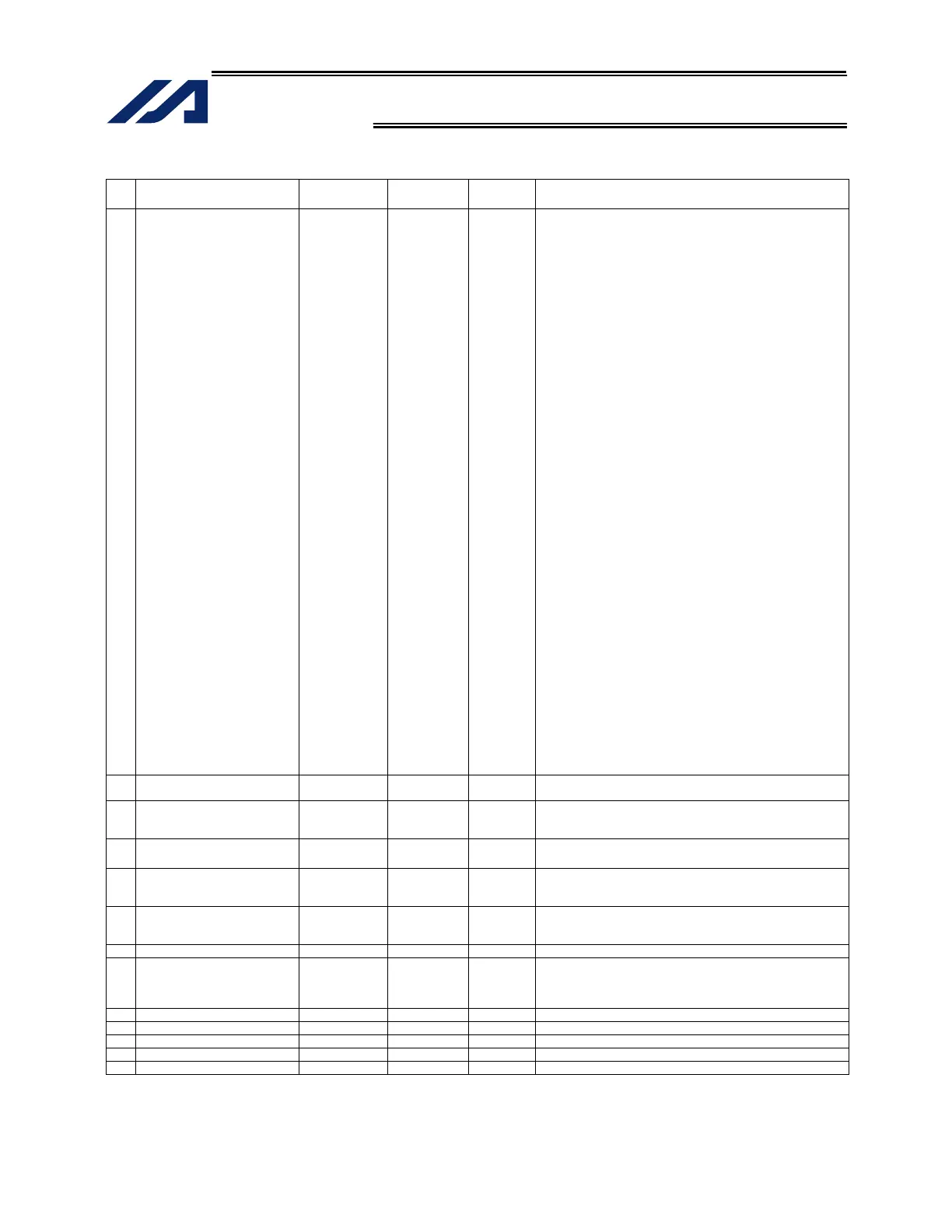
Axis-Specific Parameters
No Parameter name
Default value
(Reference)
Input range Unit Remarks
52 Synchro setting bit pattern
1
0 0H to
FFFFFFFFH
* Effective only when specified for the synchro slave
axis. (Main application version 0.62 or later)
Bits 8 to 11: Selection of use of phase Z of the synchro
slave axis during home return of the incremental
encoder (INC-INC control)
(0: Do not use phase Z of the slave axis
1: Use not use phase Z of the slave axis)
* If phase Z of the slave axis is used, the following
parameters of the slave axis will become effective:
“Axis-specific parameter No. 21, Offset travel distance
at home return”
“Axis-specific parameter No. 12, Home preset value”
* Adjustment method when phase Z of the slave axis is
used
[1] Complete a home return in the synchronized
mode.
Ignore the “Error No. D0A, Driver overload error”
that generates upon completion of home return.
If an “Error No. C9C, Defective phase-Z position
error” generates, the relationship of the installed
positions of both synchro axes must be adjusted.
If an “Error No. C72/D6B, Overrun error” generates,
adjust the relationship of the installed positions of
both synchro axes or set “Axis-specific parameter
No. 15, Overrun-sensor input polarity” to “0 (Do not
use)” and stop using the overrun sensor.
[2] Turn the servo OFF by actuating an emergency
stop.
[3] Align the physical position relationship of the
synchro master axis and slave axis and then read
off their present position coordinates.
[4] Calculate the value of “present position
coordinates of synchro slave axis – present
position coordinates of synchro master axis” and
set the calculated value in “Axis-specific
parameter No. 21, Offset travel distance at home
return” for the synchro slave axis (Exercise
caution that unit conversion is required in the
above calculation.)
[5] Write the data to the flash ROM, and then
execute a software reset or power ON reset of the
controller.
* Effective only when specified for the synchro slave
axis. (Main application version 0.63 or later)
53 Setting bit pattern 1 of each
axis
0 0H to
FFFFFFFFH
54 Travel distance for push
stop detection at home
return
20 1 to 99999 0.001 mm
Used to confirm pushing action at the time of home
return.
55 Travel distance for push
stop detection at positioning
30 1 to 99999 0.001 mm
Used to confirm pushing action according to the PUSH
command.
56 Push-abort deviation ratio
at home return
2000 1 to 99999 Deviation is compared against “Steady-state deviation
of push speed + Push-speed pulse speed x Abort
deviation ratio.”
57 Push-abort deviation ratio
at positioning
5000 1 to 99999 Deviation is compared against “Steady-state deviation
of push speed + Push-speed pulse speed x Abort
deviation ratio.”
58 Positioning band 100 1 to 9999 0.001 mm *Related information: Axis-specific parameter No. 52
59 Allowable deviation error
ratio
(Maximum speed pulse
ratio)
85 1 to 99 Deviation is compared against “Steady-state deviation
of maximum operating speed of each axis + Pulse
speed of maximum operating speed of each axis x
Allowable deviation error ratio.”
60 Position gain 30 1 to 9999 /s
61 FAG 0 0 to 999
62 Synchro FB gain 77 0 to 1000
63 Stop special output range 1 0 to 9999 Pulse Invalid if “0” is set.
64 Stop special output value 1 0 to 999 DRVVR

 Loading...
Loading...







