X-Stream Operator’s Manual
WM-OM-E Rev I 381
Peak-Trough Identification
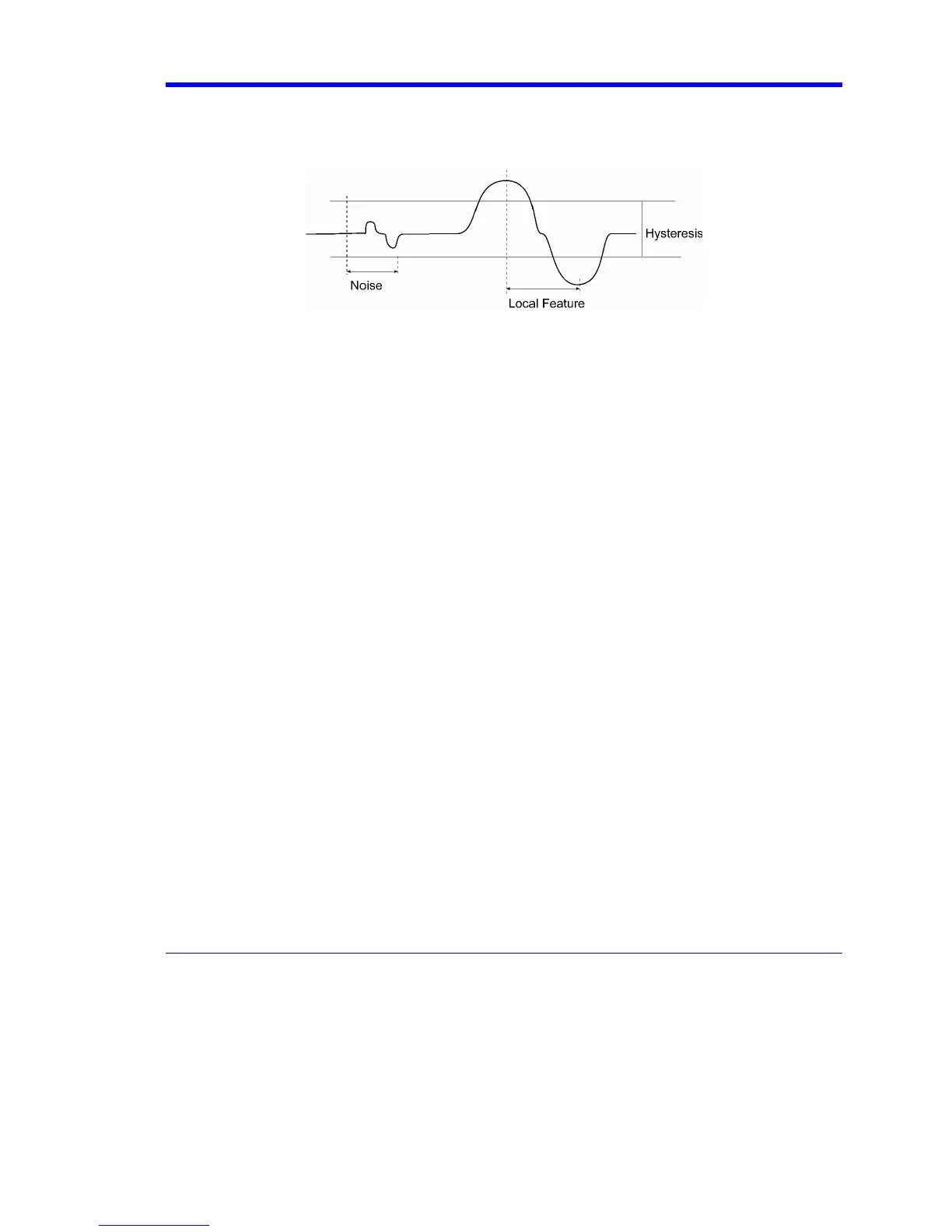
The key to identifying peak-trough pairs is the ability to discriminate between real pairs and false
ones. For example, noise in a signal can be mistaken for a local feature, as here:
Similarly, ‘bumps’ in a waveform may also be mistaken for peak-trough pairs.
In order to avoid such misidentification, a hysteresis argument is provided for many local feature
parameters. This essentially enables you to set a voltage band, which a peak-trough pair must
exceed in order not to be considered noise or a "bump."
The hysteresis setting is also essential to the way peaks and troughs are identified by the DDA.
The search for local features extends from the left to the right parameter cursor. But first a peak
must be found; and a waveform must rise to at least the value of the hysteresis setting in order to be
positively identified as a peak.
This peak search starts with the first waveform sample, whose voltage value is used as an initial
reference value for locating the peak. If a following waveform sample is found to be higher than the
first by an amount greater than the hysteresis setting, a peak is said to exist. Any sample lower than
the reference value, made prior to determination of a peak’s existence, is used as a new reference
point.
When a waveform rises by an amount that is more than the hysteresis, compared to the lowest prior
waveform sample, the criterion for the existence of a peak is met. Then the search for its exact
location and voltage value is initiated. Successive samples are compared to find the highest
sample. Next, two points are found, one on either side of this highest sample and down from it by at
least 25 % of the distance to the previous trough amplitude. A quadratic interpolation is then
performed on these three samples to find the new peak location and amplitude. The same
approach, using a sample lower than the highest sample by more than the hysteresis setting, is
used to locate the trough.
Local Baselines
Many parameter measurements require that the baseline of a local feature be identified. In order to
account for asymmetries due to MR heads, baselines are identified between the peak and trough,
and between the trough and the following peak.