Section 7 - Environment and Navigation Menu
Page 98 90-8M0070299 eng MAY 2012
Viewing Autopilot Data (Zeus and Axius Only)
Autopilot is a drive integrated system that utilizes a GPS receiver, a customer‑supplied NMEA 0183 compatible chart plotter, an
inertial measurement unit (IMU), the electronic helm in combination with the VesselView, joystick control, and the Precision
Pilot or Axius trackpad. Refer to your power package owner's manual for a complete understanding of the Autopilot features
and operation.
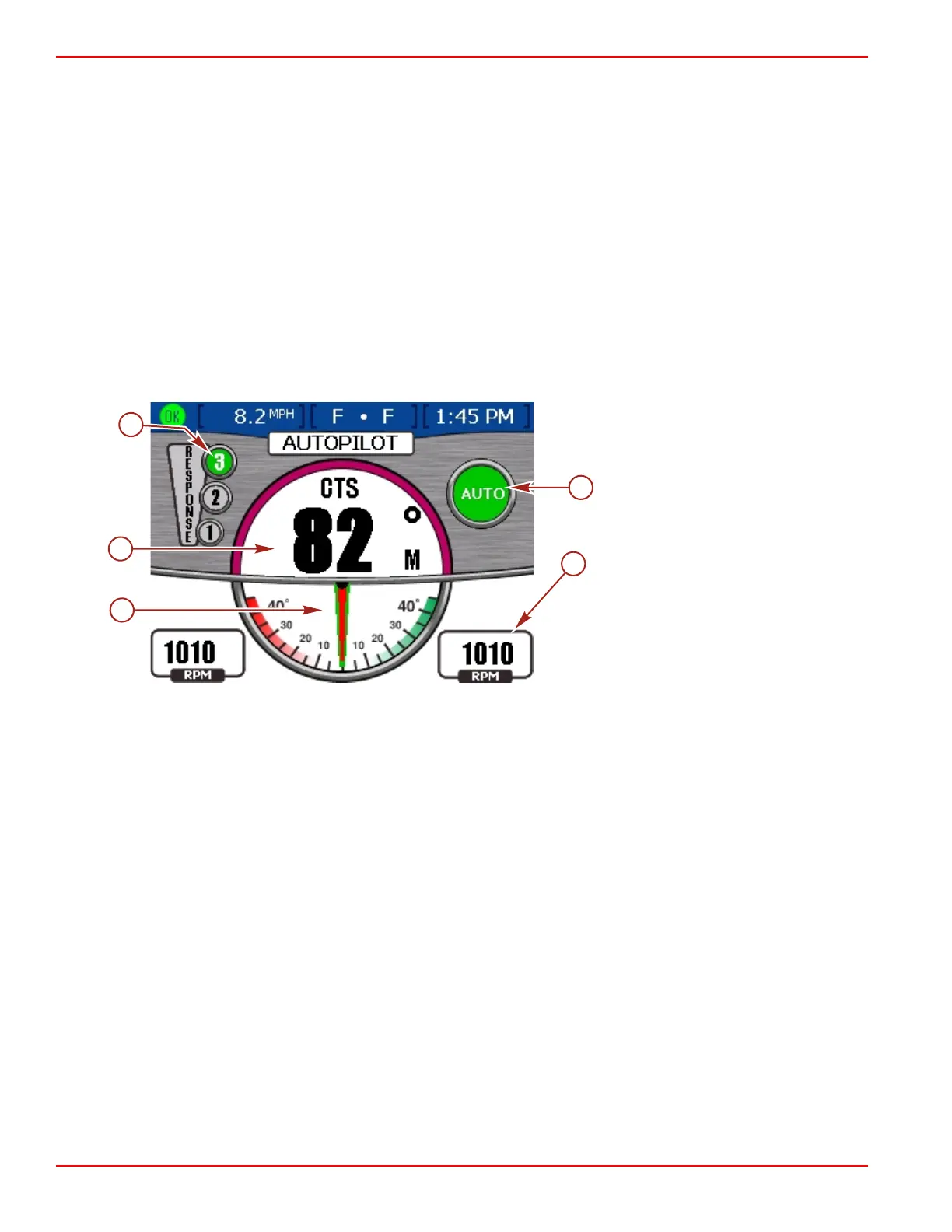
Autopilot indicates the drive location (angle) with a needle colored red, black, and green. Red indicates the port drive, green
indicates the starboard drive, and black indicates the center drive. The center drive color can vary with red or green, depending
on the configuration and number of VesselView's installed.
Using the trackpad, the operator is able to use waypoints, tracking along a desired path; the boat will navigate itself along this
path.
NOTE: Autopilot will not initiate turns when track waypoint mode is engaged. Turn features are only available in auto heading
mode.
• Autopilot functions are controlled through the Precision Pilot trackpad or Axius trackpad only.
• When autopilot is engaged, "AUTOPILOT" screens appear on the VesselView for three seconds unless calibrated
otherwise.
• The response level is used to change how aggressive corrections respond on Zeus applications only. "1" is for calm
conditions, "2" is for moderate conditions, and "3" is for severe conditions.
a - Response level
b - Compass heading
c - Drive angle reference
d - RPM
e - Autopilot icon
• Pressing any button on the VesselView cancels the "AUTOPILOT" screen, unless the "AUTOPILOT" screen was selected
from the VesselView "Environment and Navigation" menu.
• The "TURN" buttons on the Precision Pilot or Axius trackpad provide a 10° course correction for each press to the port or
starboard.
• The joystick provides a 1° course correction for each press to the port or starboard.
The steering wheel feels locked into a detent when "AUTO" or "TRACK" are engaged. Approximately 3.4–4.5 kg (8–10 lbf) is
required to overcome this detent. Manually overcoming the steering wheel's detent force automatically puts the autopilot into
standby mode.
Standby
• In standby mode, the display shows a digital compass value and the angle of the drives when engaged.
• The compass value is the actual heading from the IMU.