M Series AC Servo
User Manual
89
Rev. 1.0
7/31/2019
400-820-9661
7.2.7 In Position Error Output
In position mode, using the
“
in position error output
”
function can help the user the define motors in
position status. When the difference between drive
’
s total receiving pulse and motor
’
s actual rotating
pulse count is within the in position error range, the drive will send out a motor in position signal.
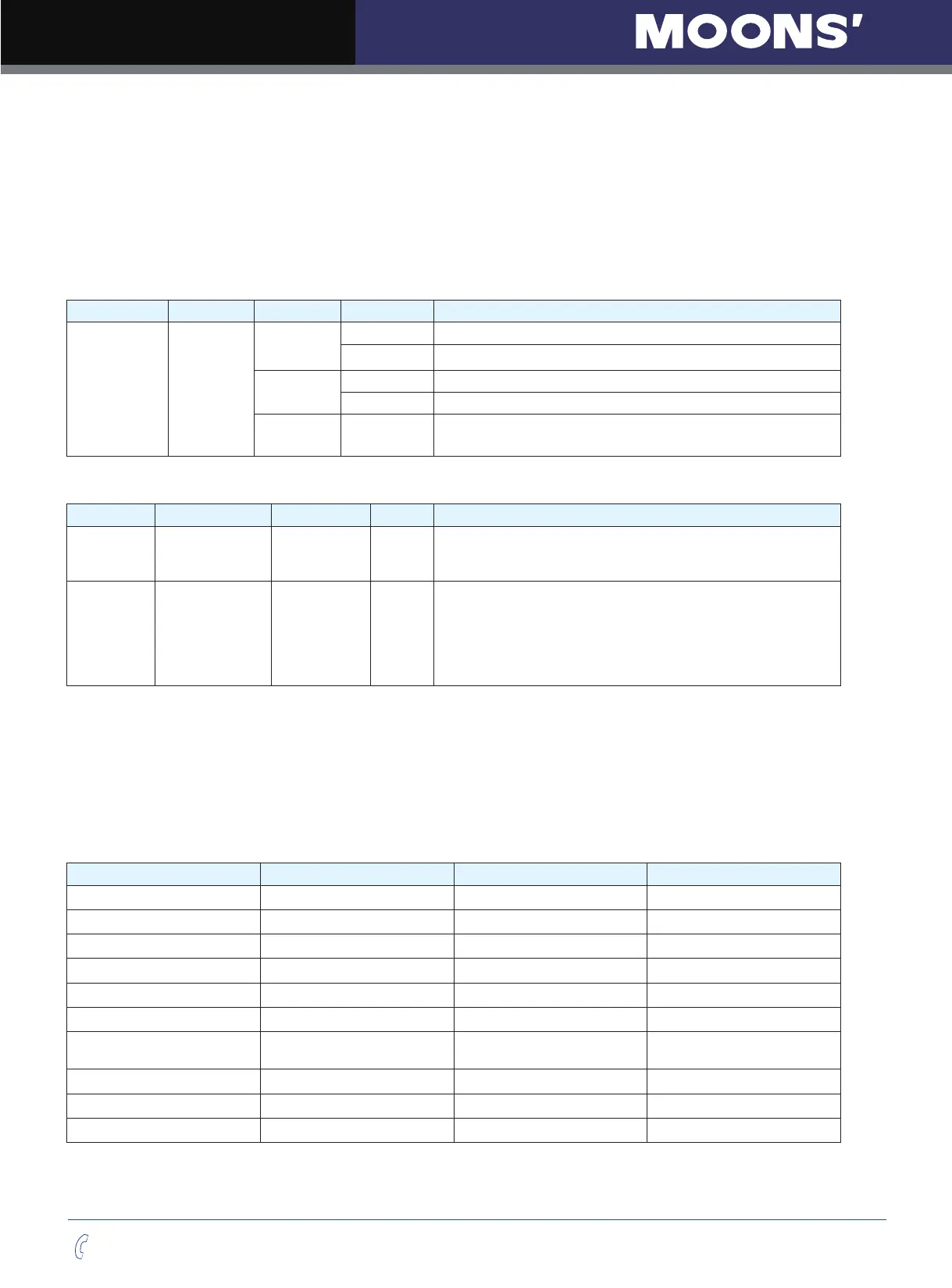
The forth digit of parameter P-68 (MO) defines Y6 output function. parameter P-46 (PD) defines in
position error range. P-47 (PE) defines in position error timing duration. If the in position error is within
the P-46 (PD) range for more than the time duration of P-47 (PE) setting, the drive will output motor in
position signal.
Signal Name PIN P-68 (MO) Condition Function
Y6
Y6+ (14)
Y6- (13)
5
□□□
Closed Closed means motor not in position
Open Open means motor in position
4
□□□
Closed Close means motor in position
Open Open means motor not in position
3
□□□
(default)
General purpose output, function disabled
Parameters Setting
Parameter Name Data Range Default
P-46 (PD)
In position error
range
0~32000 10
This parameter sets the in position error range, when in position
error count is less than the range, drive will indicates motor in
position.
P-47 (PE)
In position
duration count
0~32000 10
If the position error is in the in-position range and last longer
than the duration time, the motion is supposed to be complete
and the motor is in position. If the time value is set to 100 the
position error must remain in the range for 100 processor cycles
before the motion is supposed to be complete. One processor
cycle is 250µsec.
7.2.8 Gain Parameters For Position Control Mode
In position mode, reasonable gain parameters will let the servo system running and stop more smoothly,
and accurately, and optimize its performance.
In most the cases, M2 servo suite software
’
s auto tuning function will help you to tune these parameters.
However, in some case customer can also use the fine tuning function from the software or parameter
setting mode on the drive find out the best performance for you.
Parameter Name Data Range Default
P-00(KP) Global gain 1 0~32767 10000
P-01(KG) Global gain 2 0~32767 12000
P-02(KF) Proportional Gain 0~32767 10000
P-03(KD) Derivational Gain 0~32767 3000
P-04(KV) Damping Gain 0~32767 10000
P-05(KI) Integrator gain 0~32767 500
P-06(KK)
Inertia Feedforward
Constant
0~32767 800
P-07(KJ) Jerk Filter Frequency 0~32767 5000
P-10(KE) Deriv Filter factor 0~32767 15000
P-11(KC) PID Filter factor 0~32767 25000